I just finished to build my first drone but I can’t make the motors spin. when I click on the arm button on mission planner I don’t get any errors but the motors don’t spin. I have some scratches on my frame that also does PDB but I don’t think that they are big enough to damage the circuit. though I have a problem: I can’t calibrate the esc’s, everytime I launch the calibration, everything goes well, the leds on my pixhawk1 blink blue green,red but they go on forever. I can post pictures if you want but I don’t know of what. Any help will be appreciated.
You can not arm until the ESCs are calibrated. Solve that problem first.
Under some circumstances you can only calibrate the ESCs after calibrating the RC receiver. Have you done that?
the steps are mentioned here. If you use Herelink RC, use a separate power to power the Herlink air unit and keep it ON throughout the ESC calibration process.
what is your BRD_SAFETY_DEFLT value?
Yes. I can launch the esc’s calibration, I do as it is written on mission planner, and the leds on the pixhawk blink blue red green, which means it is being calibrated. but the calibration never ends, because the leds go on like that for like half an hour and I just unplug the battery after that amount of time. Is there like a way to know that the calibration ends, or to know if the problem isn’t a hardware problem?
BRD_SAFETY_DEFLT value is 1 (enabled)
And I use elrs.
Calibrate your RC first.
Then you have to press the hardware safety button.
Also set MOT_SAFE_DISARM, 0, with no propeller.
I am assuming you are not using digital ESC, MOT_PWM_TYPE, 0
All these settings were already applied, I am using some basic esc’s I think, my radio is already calibrated

This is a youtube vid that I made so you could see the process. As you see I use old hardware, but I don’t think it is important. The gps has no connexion but I guess it isn’t neither. At the end of te video, I cuted but the lights would go forever.
Calibrating an ESC involves teaching the ESC what range of throttle inputs it should respond to. It needs to know what PWM value on the throttle channel corresponds with the commanding the motor to be off, and what PWM value corresponds with full throttle. These values are stored inside the ESC.
May be you face the same problem.
1 Like
I checked out some stuff and I saw something, I didn’t really understood. As I said before I have some really old esc’s, so probably the calibration process is different. I have these ones: https://fr.aliexpress.com/item/32250741238.html?src=google&src=google&albch=shopping&acnt=248-630-5778&slnk=&plac=&mtctp=&albbt=Google_7_shopping&gclsrc=aw.ds&albagn=888888&isSmbAutoCall=false&needSmbHouyi=false&src=google&albch=shopping&acnt=248-630-5778&slnk=&plac=&mtctp=&albbt=Google_7_shopping&gclsrc=aw.ds&albagn=888888&ds_e_adid=&ds_e_matchtype=&ds_e_device=c&ds_e_network=x&ds_e_product_group_id=&ds_e_product_id=fr32250741238&ds_e_product_merchant_id=107800110&ds_e_product_country=FR&ds_e_product_language=fr&ds_e_product_channel=online&ds_e_product_store_id=&ds_url_v=2&albcp=19000710609&albag=&isSmbAutoCall=false&needSmbHouyi=false&gad_source=1&gclid=CjwKCAjwouexBhAuEiwAtW_Zx5ufRZLvs4Vm9zc9DHBh0nHLPlFqLGV7aaAKDF9Rg68h5ZS-v4gtBBoCYfwQAvD_BwE&aff_fcid=5ef2523c12e34d54a4a274703cf5fe5f-1715117028421-00074-UneMJZVf&aff_fsk=UneMJZVf&aff_platform=aaf&sk=UneMJZVf&aff_trace_key=5ef2523c12e34d54a4a274703cf5fe5f-1715117028421-00074-UneMJZVf&terminal_id=cbb6873861d3434faef46e88f49eba65&afSmartRedirect=y
Do you know how I could do it?
SimonK understands PWM.
The process is described in the link Jai posted above in the chapter “Typical ESC calibration”.
2 Likes
Thanks, I looked at the documentation but there are some things I’m not sure of: In order turn the power off in the esc, I have to totally unplug it right? And I do it why esc by one, so do I unplug altl of them then calibrate one and reapeat the process 4 times or do I unplug all the esc’s do the things then plug them all together and they all are calibrated at once?
You should be able to do all the ESCs at one time.
I tried the semi-automatic but it didn’t work as mentioned in the docs: https://youtu.be/xOW4S4UgjYI
Do the motors run in Mission Planner’s Motor Test?
no, when I try to do it one motor at a time I get one long beep, a little pause and one shorter beep
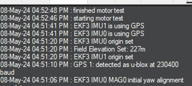
Even with increasing throttle %? What does the Messages Screen say after you try?
Post your parameters file.
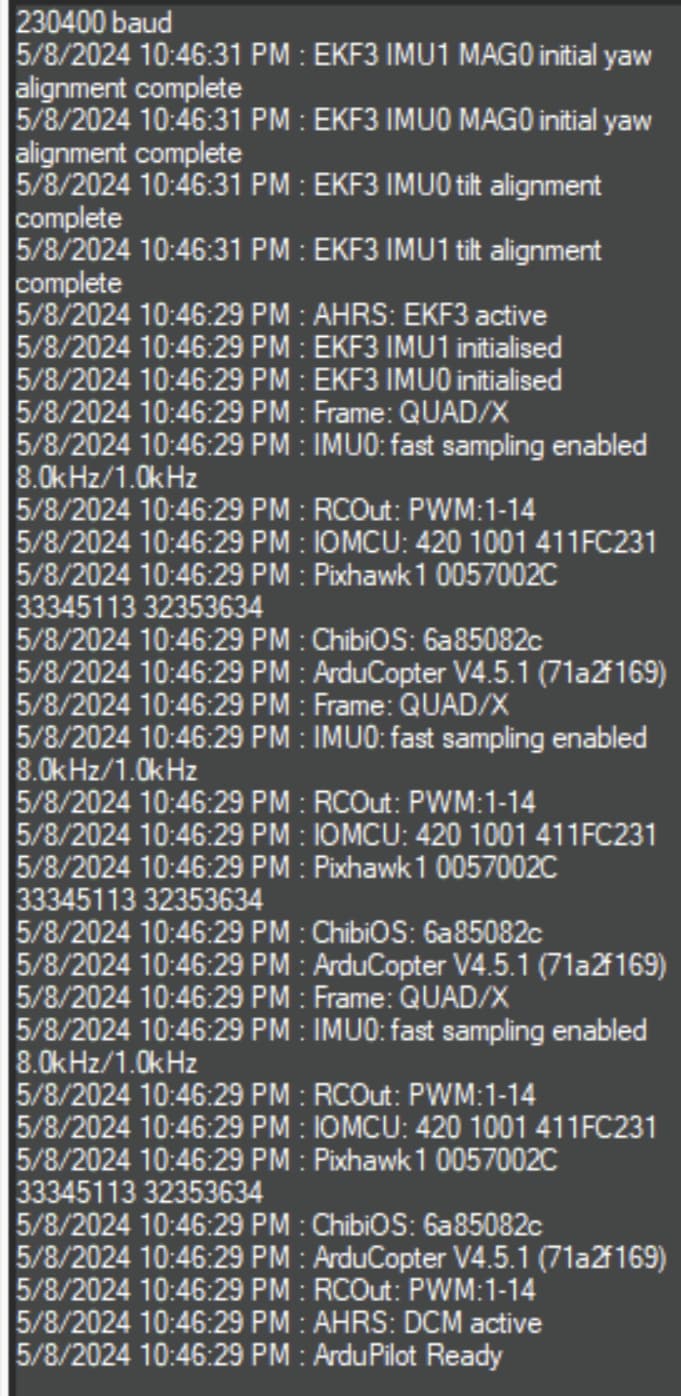
There are no Motor Test messages shown there. Run Motor Test and then jump over to the messages screen.
Like this:
From the Full Parameter List, the Save To File button and post the file saved.