I hope you are doing well.
I am flying and tuning a new H frame quadcopter - big one with 32 props.
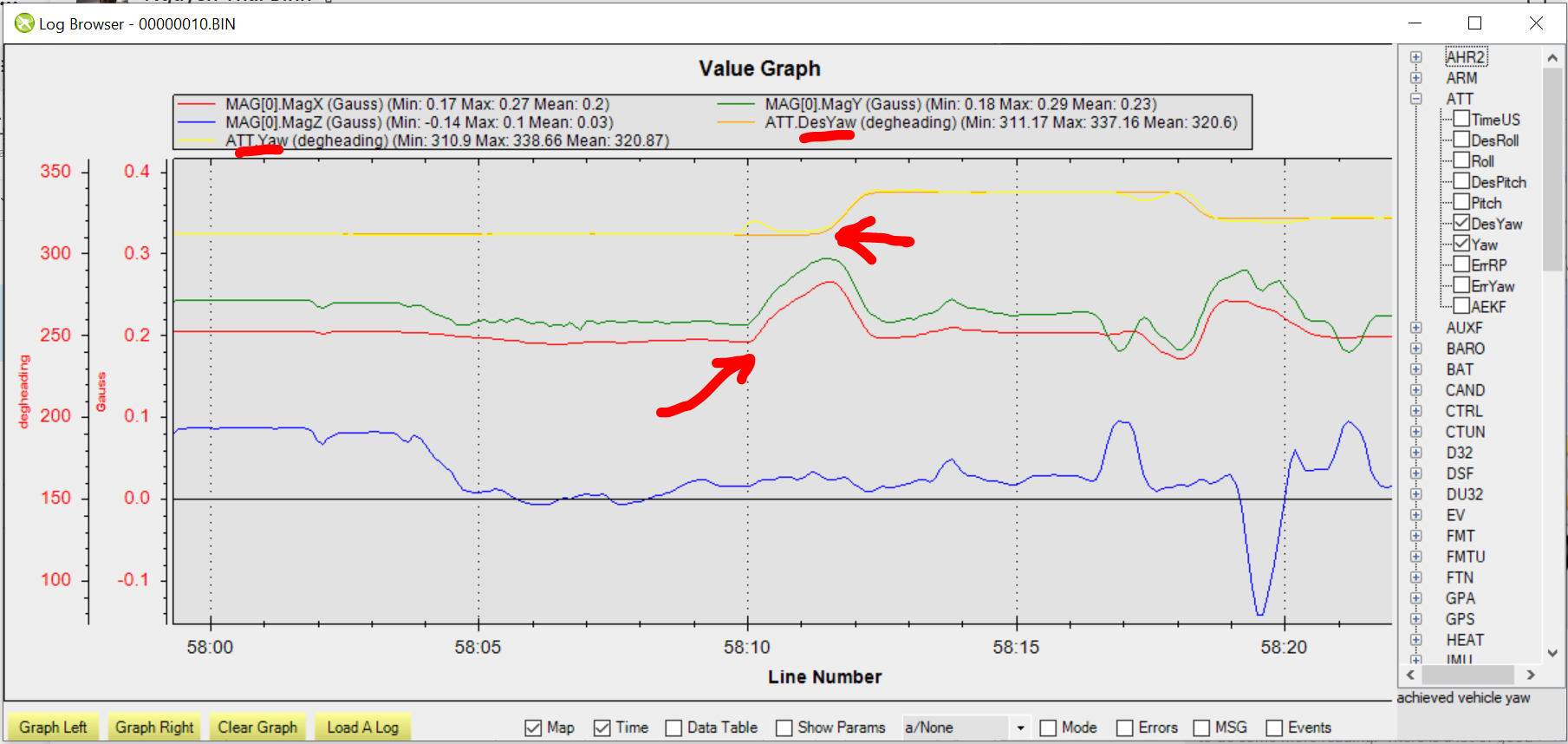
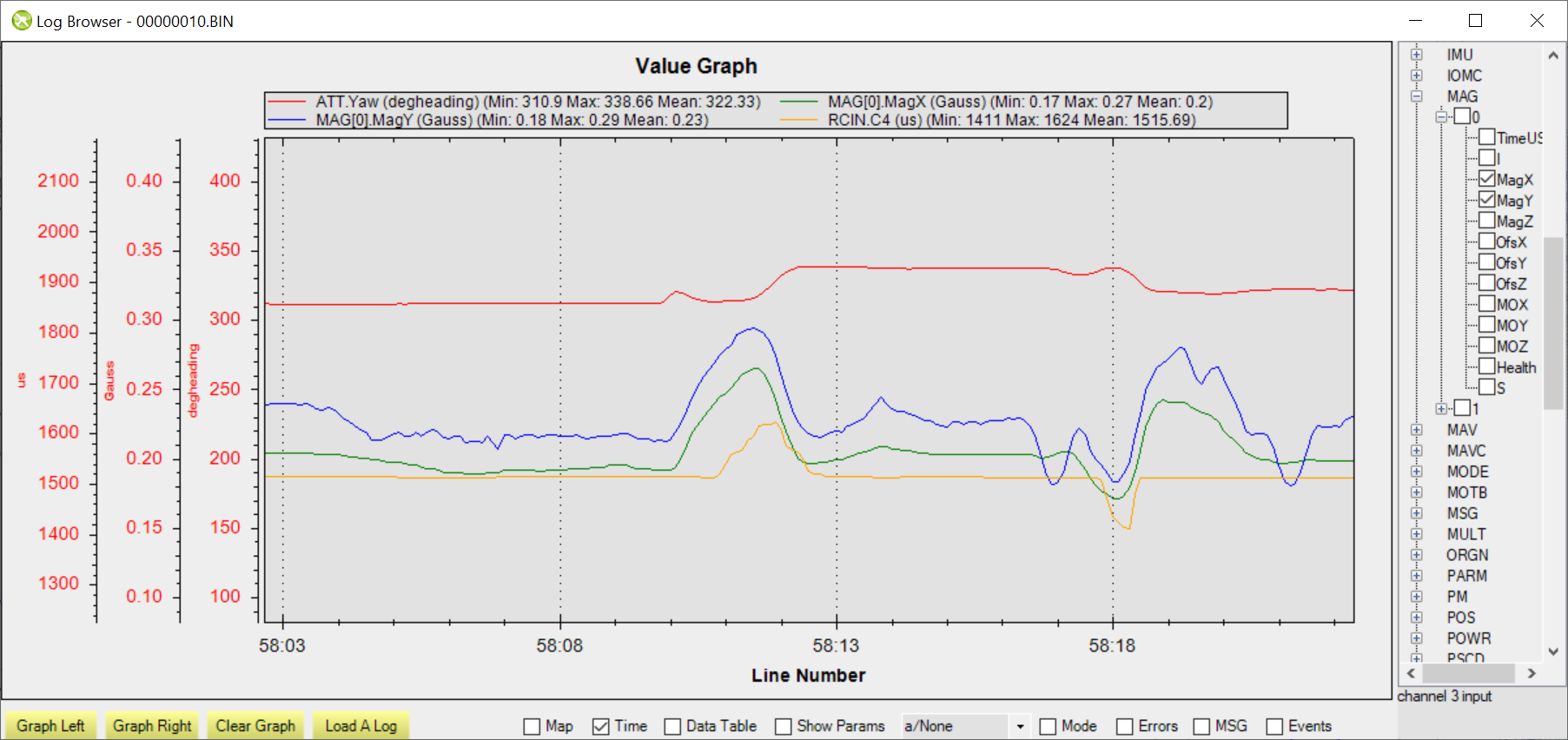
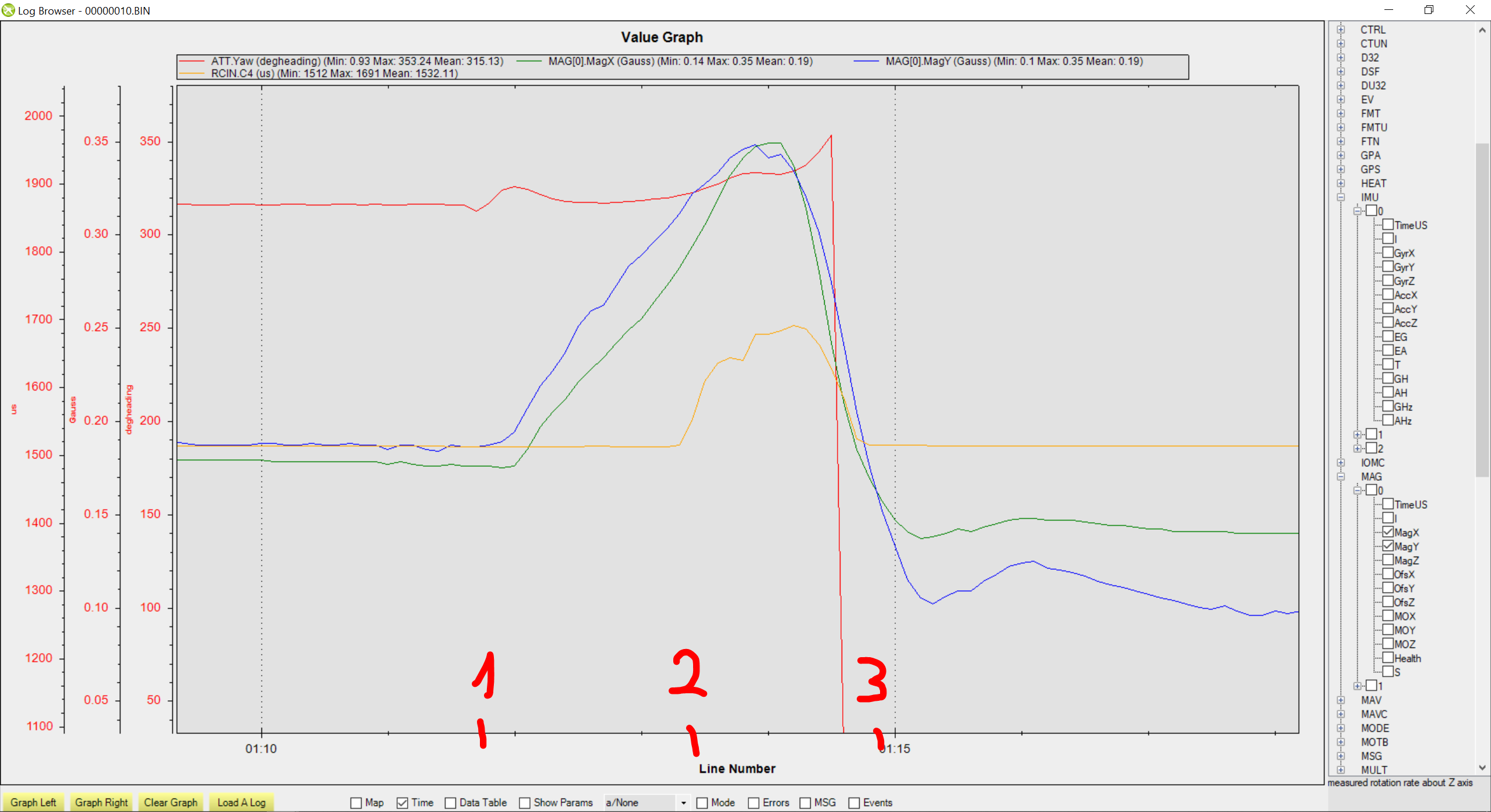
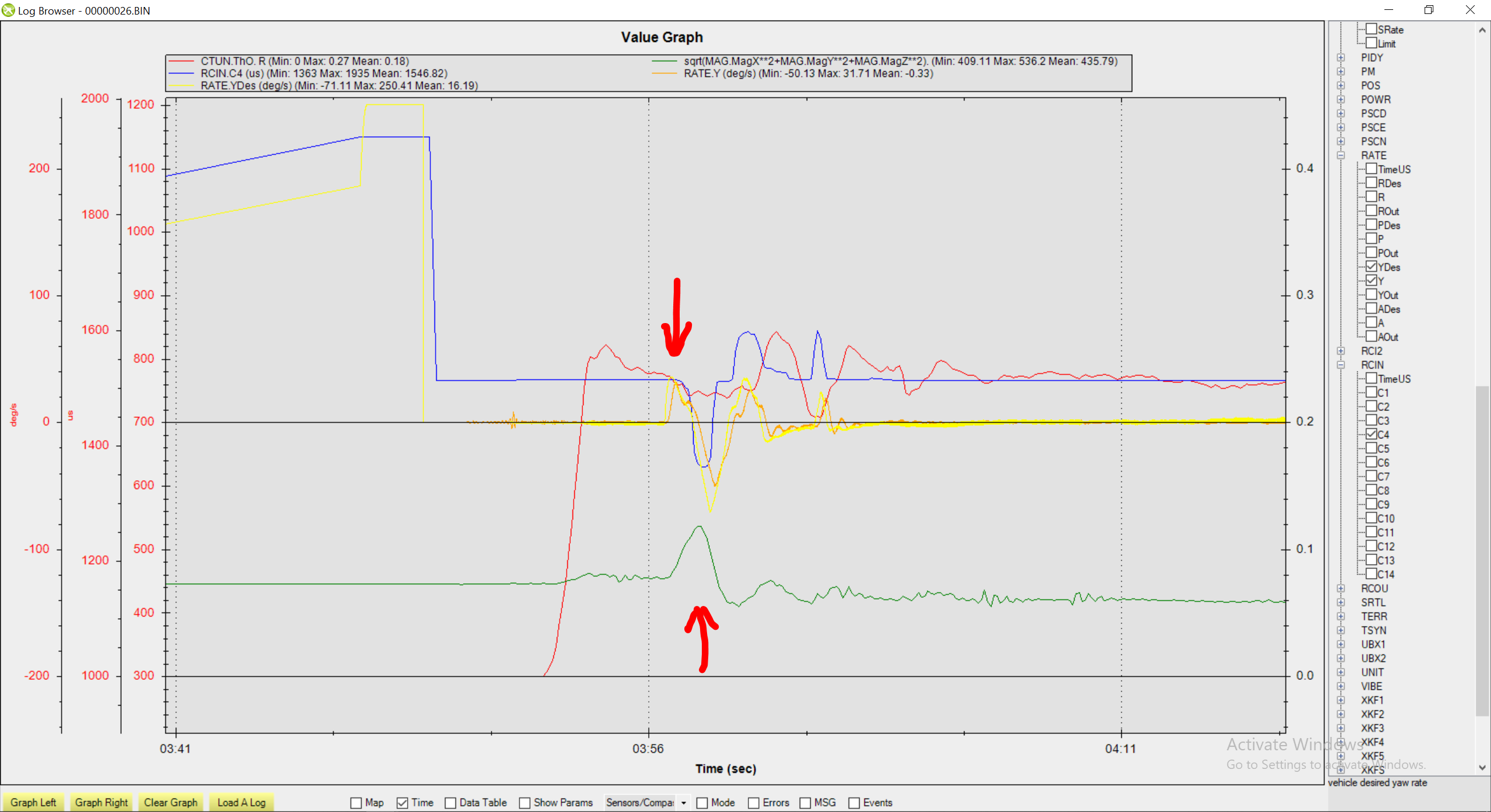
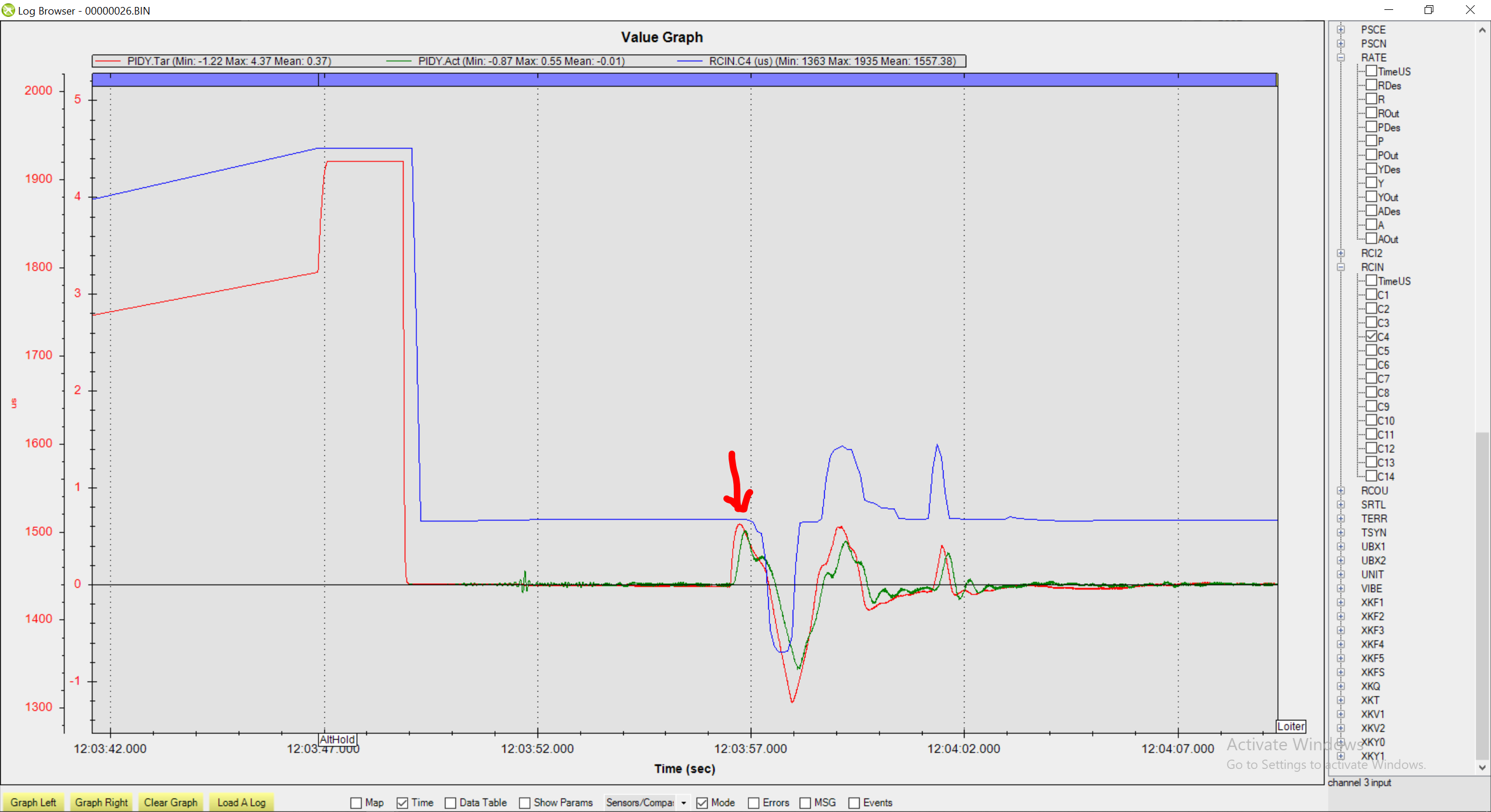
When doing manual tune in AltHold, I figured out some strange behaviours. The drone did yawing without my input in the yaw channel. When analysing log, I realize there was some “noisy” or “abnormal” mangetic intensity in x and y axis. Right after the magnetic changed, the yaw rate changed, so I had to correct it by yaw stick (my input)
Set these back to default and try the Magfit utility in MAVExplorer to calibrate the compass and set the compass motor offsets. Page down to the MAVExplorer section. Magfit
Thanks @dkemxr for introducing me this tool. I found it so helpful.
About the problem I faced here, I used RM3100 compass and Z-axis mag coil was soldered wrongly because it is polarity sensitive. After fixing everything, the problem of realigning automatically was solved.
However, I also did a test: I changed the compass Yaw axis off 180 degree on purpose and take off in AltHold Mode. Again, the copter tried to realign, it did yaw without any yaw input.
This test went back to my inital question: Is the compass used in AltHold mode?
The next question is: before taking off, why I did not receive the messaged “Error compass variance” or “Compass not healthy” instead?