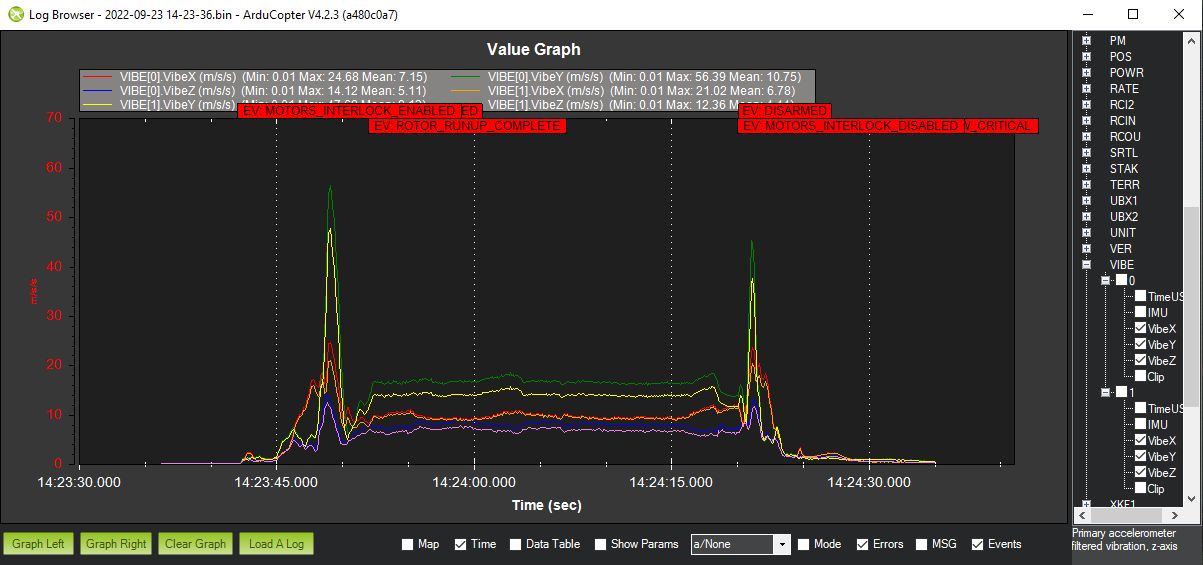
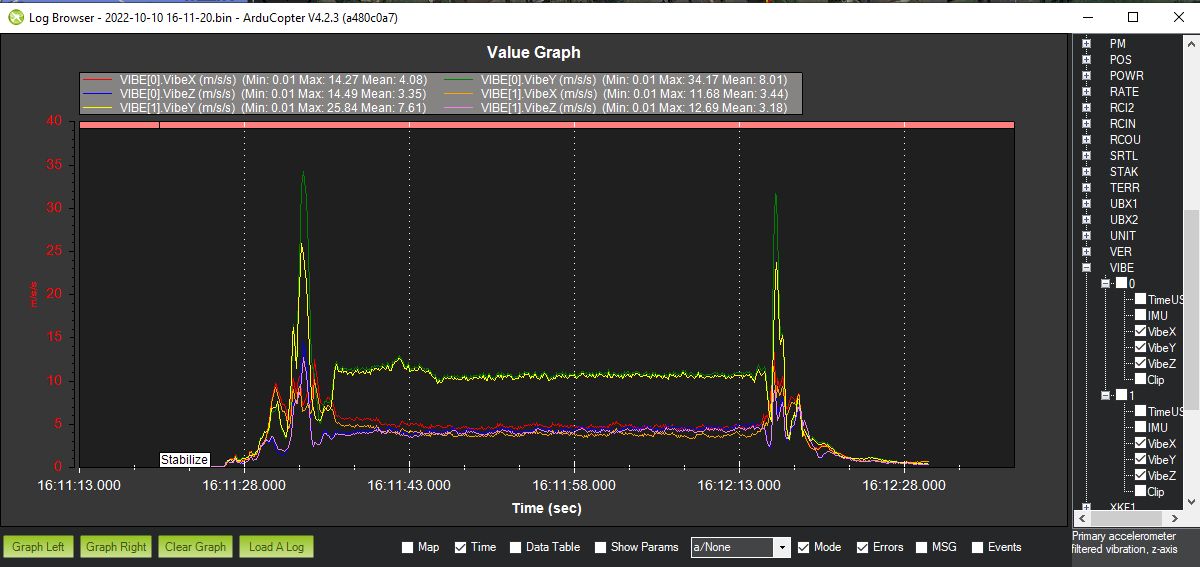
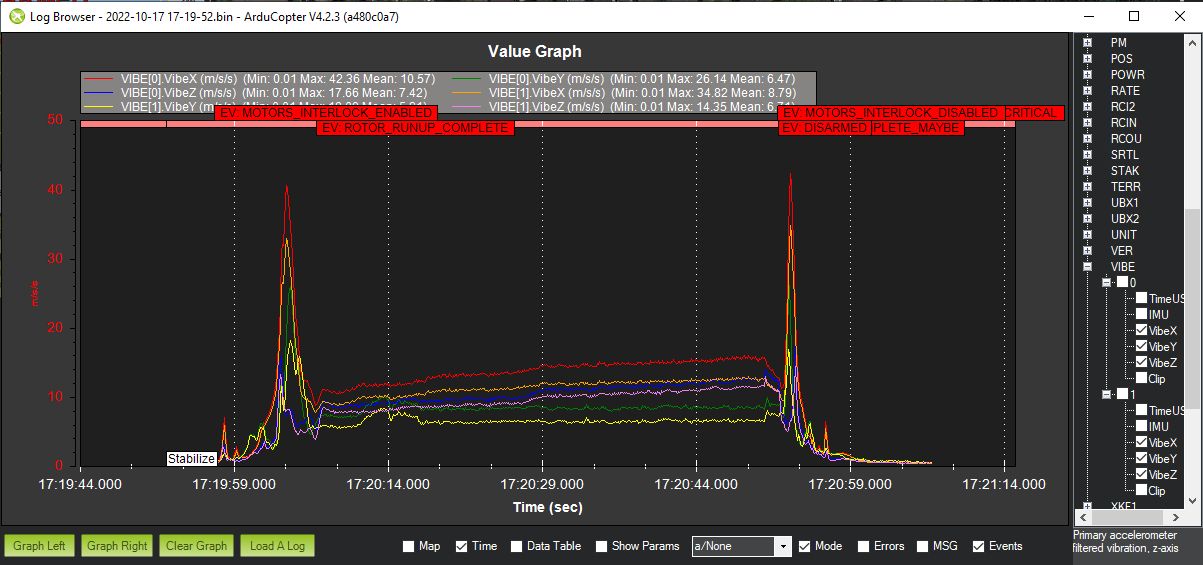
Having had a bad experience when testing my TRex 500 with 4-blade head and a Matek 743 board, due to a worn bearing on the motor causing excessive vibrations, I’ve now just run a 45-second ground test (not lifting off) with the new motor. Once the rotor is spinning at governed 1900 rpm the recorded vibrations appear to me to be very acceptable, but what about the peaks on startup and shutdown?
Seems to me that the vibration at startup is not a problem because I’ll not be lifting off until the head is at full speed, but what about the vibrations at shutdown? If I land manually in Stabilised or Pos Hold mode, or automatically in RTL mode, will those vibrations cause the heli to become unstable at that point and potentially make it tip over with the blades still turning.
My Matek board is mounted with nylon bolts on the silicone grommets that came with it, in a custom housing which itself is attached to the heli’s side frame with 3M foamy tape. A screen shot of the MP vibrations log is attached.
Hi Allan, they look high also when the rotor is spinning at governed setpoint. The peaks you see at startup and rundown are probably caused by the rotor crossing the critical frequency of the airframe, you should definitely isolate better the FC.
Thanks Ferrosan. I’ve got some Kyosho 5mm mounting tape that I can use, so I’ll see what difference that makes. But need I worry about the peaks at shutdown destabilising the craft while the rotor is still spinning?
But the slightly higher plateau after the startup peaks is still only around the 20 mark which I thought, from reading the vibration wiki, is not a problem at all.
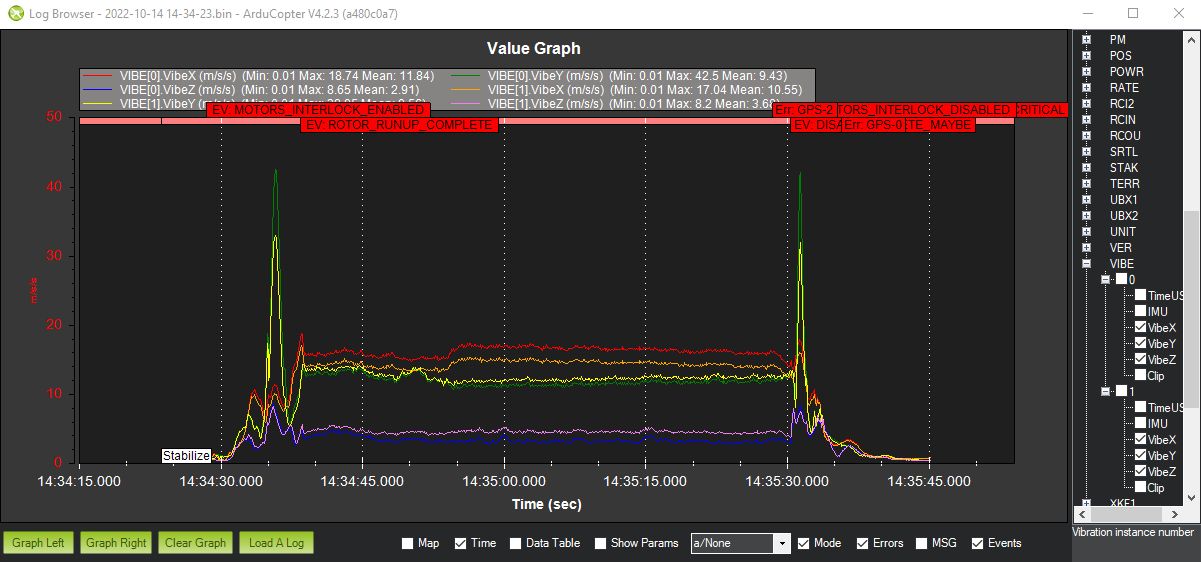
Today I’ve done another test run, same as the previous one, without lifting off, with Kyosho 5mm gel to mount the Matek’s housing instead of 3M tape. The housing is 33 x 40mm, so I used a 33x15mm strip of gel at each end of it. The graph of the vibration readings is shown below. The x and z vibrations at spool up and shut down are significantly below what they were with the 3M tape, but the y vibration has increased from previously, though it’s still only a maximum of 56 or so.
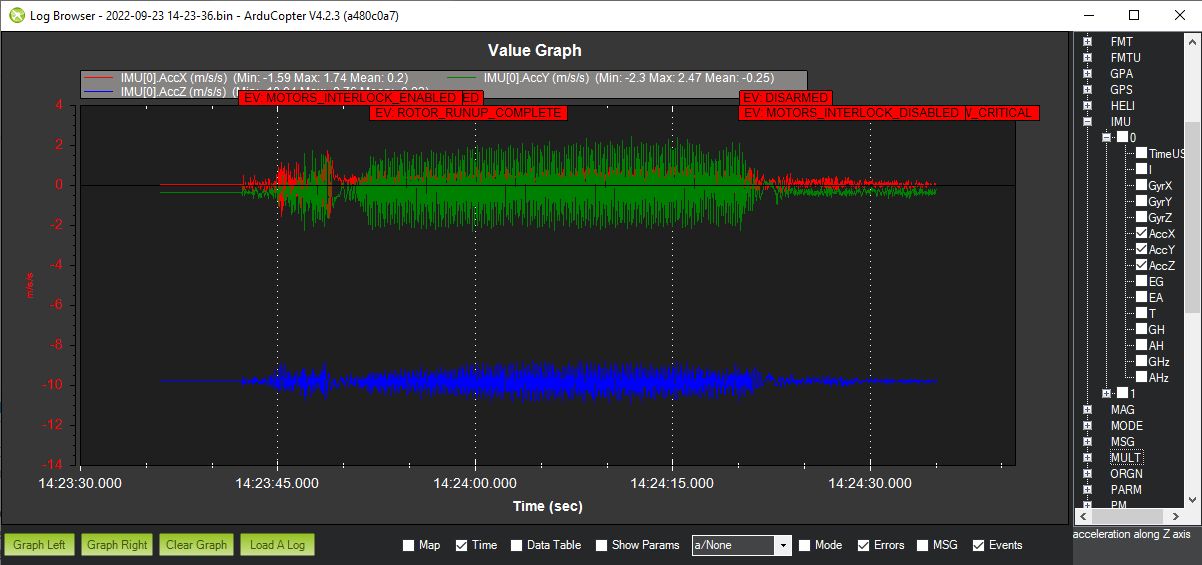
Following the ‘Measuring Vibration’ wiki I’ve also graphed the IMU x, y, and z vibrations, and they seem to be fine according to the wiki, even during the spool up and shut down phases.
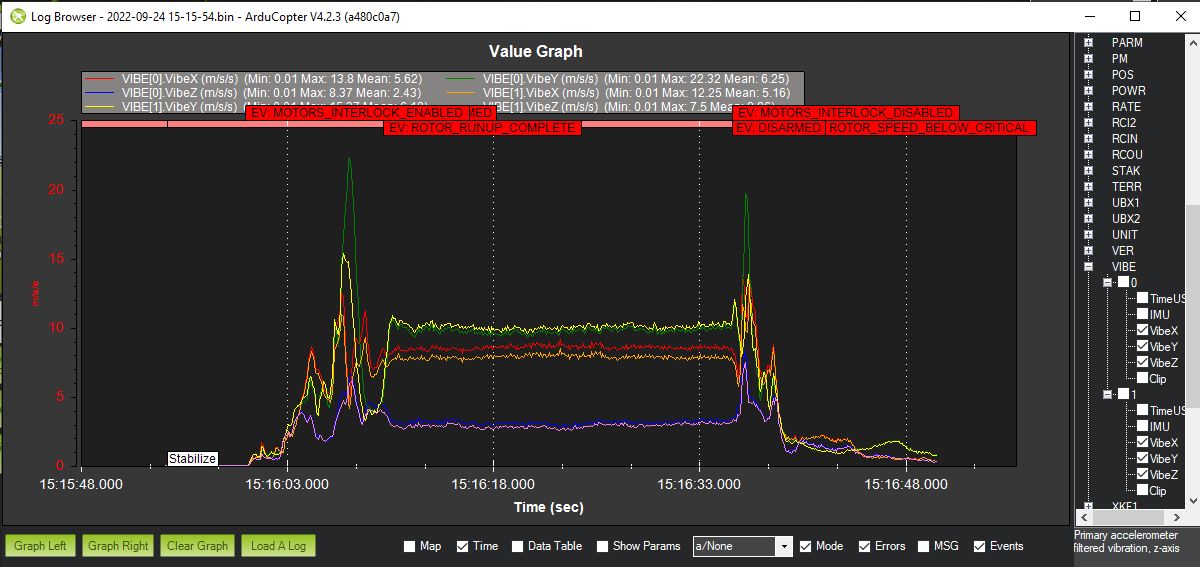
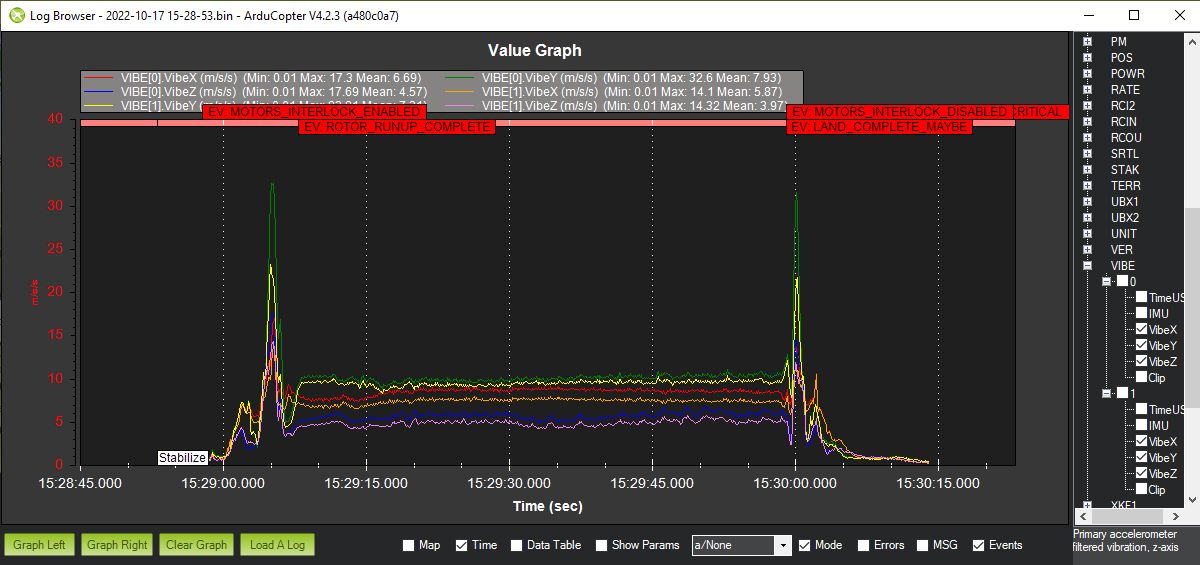
Looks like I’m getting somewhere I’ve bolted a 20-gramme flat piece of lead onto the outside of the Matek’s housing, and maximum vibration is still in the Y direction, but it’s reduced to a maximum of 22.32 during spool up and shutdown.
According the the wiki I should be okay to fly with those vibration levels (“… below 30m/s/s are normally acceptable.” …), but next I’ll see if I can improve the main blade balance, assuming that the Y axis is lateral vibration and, if that reduces the peaks I’ll then probably install the lead permanently between the gel pads and the housing, instead of on the front.
Edit: I’ve just learned that the Y axis is pitch, so vibration there presumably is mainly caused by the tail rotor. I’ll have to look at that.
Oh, now I am confused! So what can cause vibration in the Y direction without also causing it in the fore-aft direction (X?), as would presumably be the case with out-of-balance head and main blades? Incorrect phase angle on my 4-blade head?
Since yesterdays tests I’ve improved the main blade balance (a 1/8" strip of Align’s balancing tape on one blade) and installed a new pair of tail blades which appear to be perfectly balanced, so we’ll see what the result is today.
Gyro
X- rotation about accel x-axis - roll
Y- rotation about accel y-axis - pitch
Z- rotation about accel z-axis - yaw
Accel y vibrations can still be caused by an out of balanced rotor head. I think what you had with the lead weight was acceptable. I really think that it was caused by the mount or frame resonating with the rotor during spin up and shut down.
Thanks Bill, I now see the difference when talking about the axes for accels and gyro.
The frame does visibly resonate during spin up and shut down. Vibration during spool up, I assume, is not an issue because I never commit to flight until it’s complete, at which point the vibration has settled down. My real concern is whether the vibration during shut down will cause the controller to make an unwanted control movement that causes the heli to topple over while the blades are still spinning.
Does the controller cease making all control outputs as soon as it’s disarmed, either manually in Stabilised or Pos Hold mode, or automatically when landed is detected when auto-landing in RTL mode?
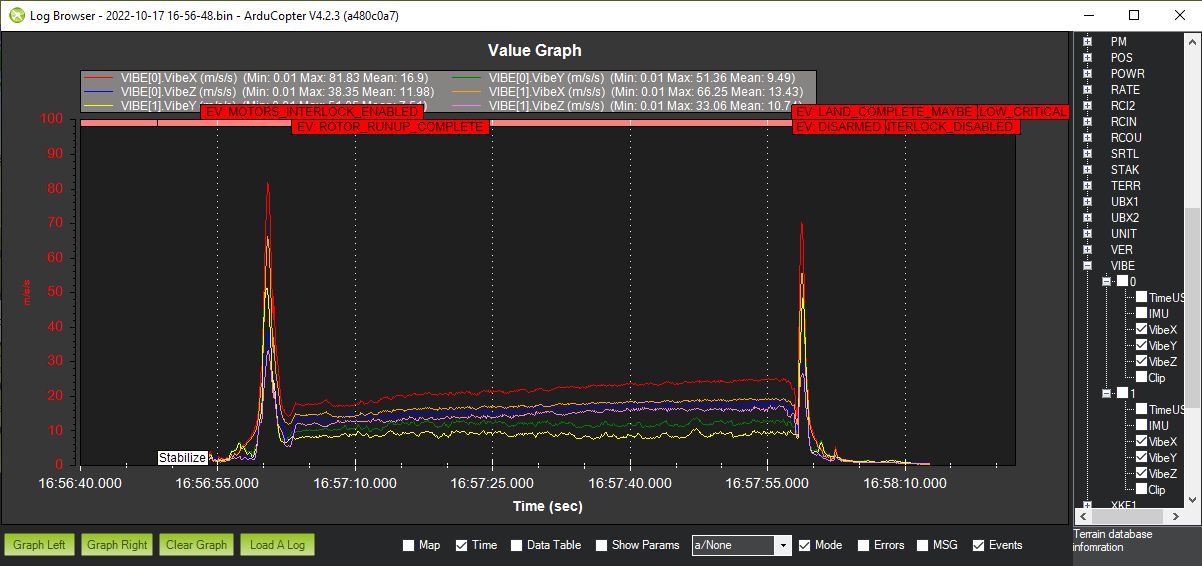
A successful 6-minute hover at the field today. Today’s vibe plot is attached for info. Since yesterday’s test the main blades have been re-balanced, as mentioned above, and new tail blades have been installed. There’s still work to be done to reduce that Y vibration, but at least it seems to be flying correctly.
Thank you to those who contributed to this thread.
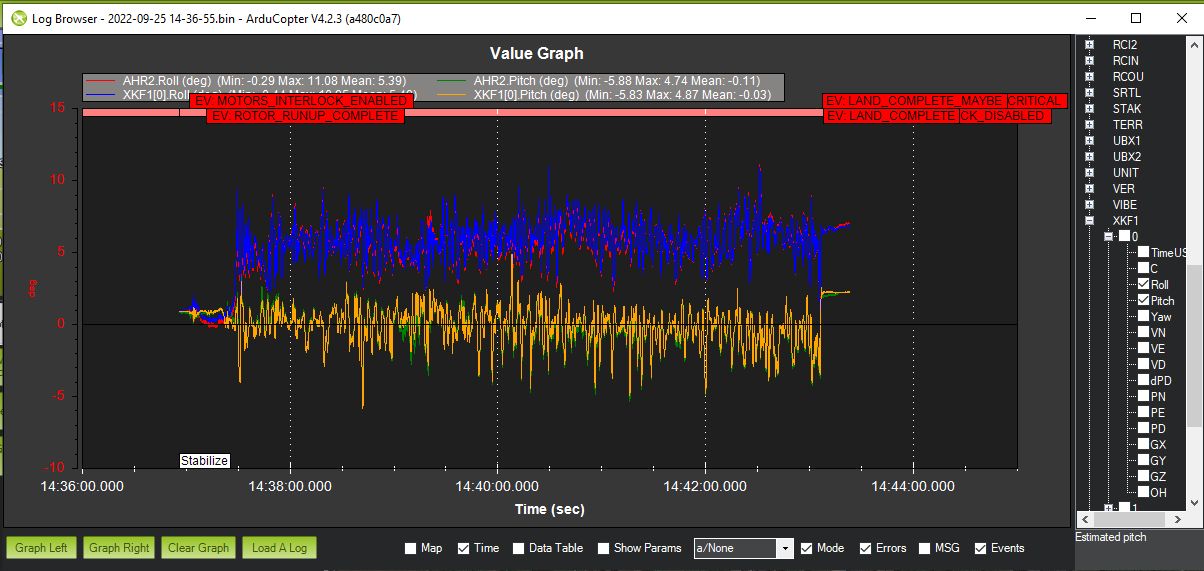
Allan, forgot to mention, when evaluating the impact of vibrations on the attitude estimation you should look at AHRS-pitch/roll and XKF1-pitch/roll, their match should be within 2deg range.
After checking blades static and dynamic balance, did you also check the main mast? finally how tight are the main blades into the blade grips?
Thanks Ferruccio. I’ll look at AHRS and XKF-1 pitch and roll.
The main shaft was replaced a few weeks ago as a precaution, after it tipped over on landing, with the blades still turning. Main blades are just tight enough that they will hold position when the heli is tipped on its side, so I think I can be sure they’re extending properly. Maybe they need to be tighter to stop flopping around at shutdown?
Reading a few other forums it seems that the torque tube tail drive is the next thing to check out and, possibly, install a second bearing on it. I thought vibration there would cause high X-axis vibe values as well as Y-axis, but anyway it’s a reasonably easy item to check.
Next flight won’t be for a couple of weeks due to other comittments, but it will be with a slightly reduced head speed, for I felt it was too high, and it ran my battery down completely in 6 minutes compared with my 2-blade TRex 500 which runs for 7 minutes with 20% or more remaining.
Did you mean AHR2, not S? I’ve double checked and there’s no AHRS in my logs.
Anyway, here’s the screenshot from the same flight as before, showing the AHR2 and XKF-1 pitch and roll are almost indistinguishable – well within 2 deg of each other. I presume that’s what you meant, not that they should each stay within a 2 degree range, because they don’t.
Exactly, I said they should match “within” that range, sorry if that was not clear.
I would say Y-axis and Z-axis. Y-Z plane (orthogonal to the torque tube) is where the eccentricity would take place in case of poorly supported or bent shaft.
With the 4 blade rotor are you running the same pinion of the two blade setup?
Thank you Ferruccio, and apologies for the delayed reply.
I was mixed up about the axes, but understand now. Seems to me the Y vibration may be a resonance in the tail boom, which still could be caused by the torque tube drive shaft.
I’m running the same pinion (11T straight cut) as I do in my 2-blade heli, with the head speed governed down to 1900rpm for the test results I posted, but I’ve now governed it down to 1750 for my next test flight.
This heli is bare frame at the moment. It will go back into its Hughes 500 scale fuselage when I’m happy with it’s Arducopter performance. Out of laziness I hadn’t reinstalled the tail boom supports for these tests, but having done so this afternoon I see an immediate decrease in the Y-axis vibrations of almost 50%
So now I’ll check out Pos Hold and RTL, and chase the vibrations further after I’ve put the heli back into its fuselage.
Having got the vibration to an acceptable level I thought that putting the lead ballast between the 5mm gel and the Matek housing, instead of on the front of the housing, should reduce vibration even more. I was wrong
The vibration level wasn’t catastrophic, but it was worse than when the ballast was on the front. Compare the screenshot in post #16 with lead on the front of the housing, with this one with lead between the housing and the gel.
The lead is now back on the front of the housing, and a short hover has confirmed the vibration levels are back to where they were in post #16. So no more vibration tuning until the TT drive shaft bearing holders I’ve ordered arrive. Then I’ll try one or two extra bearings on the TT.
Another development though, which worries me, is that when I went to the flying field yesterday I found, before I armed the heli, that my FC had fallen off! The Kyosho 5mm antivibration sheet I was using to attach the FC to the heli frame had just let go. Now that I’ve got good vibe levels I’m tempted to go back to my original 3M mounting sheet and no lead, since the vibration levels in post #1 weren’t that bad, and they should be better now with the 2-bearing TT drive.
Even though this latter configuration shows more vibration than with the Kyosho 5mm sheet (post #16), its maximum during flight was about 15.88 so I think I’ll stay with this configuration because I’m happier that the 3M sheet will stay attached than I am about the Kyosho sheet.
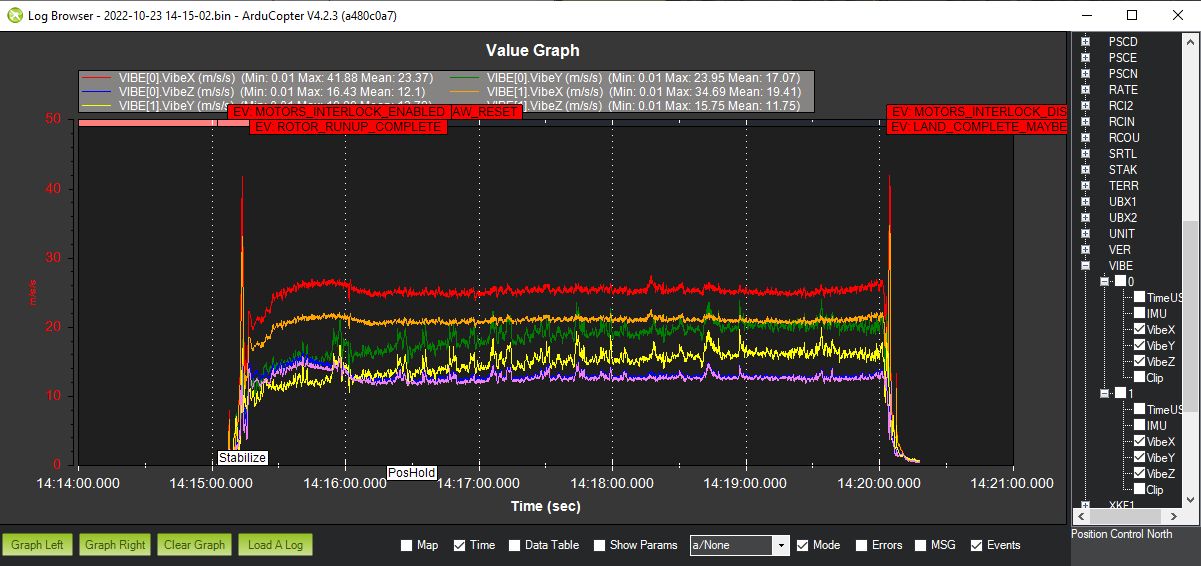
Oh dear, the latest log is not encouraging. I managed a 5-minute test flight today, most of it in POS HLD mode, but the vibrations are steady throughout the flight at around 26, compared with maximum about 18 for the 1-minute flight earlier in the week. Nothing on the heli has changed.
It was quite a windy day, but I observed no problems during the flight – it wandered a little height and position-wise during POS HLD because of the wind, but wasn’t ‘toilet bowling’. My landing in POS HLD mode was uneventful despite the spike in vibe, which was the issue which I was initially concerned about.
I’ve just measured my FC housing and realised that it’s narrow enough to fit between the heli side frames, so I’m going to relocate it horizontally in the traditional gyro location above the rear drive gearbox, where I can use Kyosho gel without worrying so much about it falling off