@xfacta Thanks for the info. I bet there is a lot we can do in the settings to smooth out the GPS info. I haven’t even scratched the surface yet I think. I did have it on the little mast that came with it but today I kinda took all that apart and just used some double sided sticky tape and stuck it right on the front lol. It worked ok but I may have got lucky…
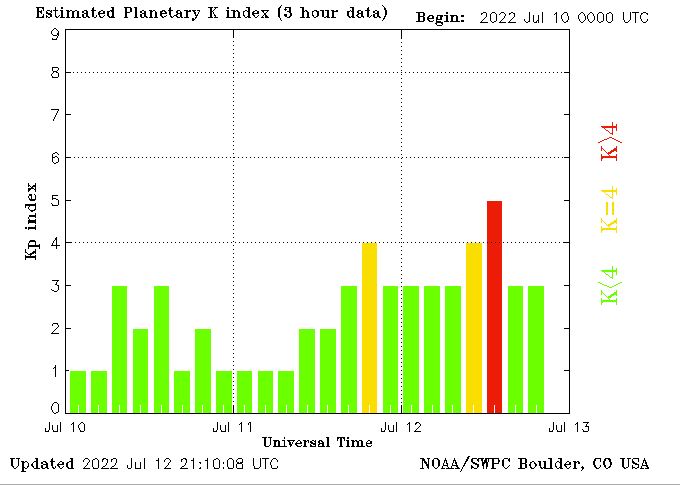
There are a few sites that publish it: Kp Index Kp Index
You can also add it as a User Item to the HUD in Mission Planner if you like. Not sure of the source.
So I’ve messed around with the P, I and FF settings and have got it going fairly good. It had some weird oscillations when trying to steer straight as seen here. - YouTube I lowered the the settings to P-.6, I-.6 and FF- 1 and that cleared it up a lot.
What I’ve noticed is it tracks best right as the sun goes below the horizon and in the dark. During the day, it is very sloppy on the track I lay out but then the sun starts going down and it smooths out and stays within a few feet of where it is supposed to be. Could be coincidence.
I switched to the BN-880 module. Seems to work as well as the others I’ve tried. The M8Q is going back. It kept saying that the car was moving all over the place and the compass was also acting weird. I’ve tried to put them on the little pedestal and right on the front and I can’t really tell a difference so I just used some double sided tape and stuck it on the front.
@oldgazer1 I tried but that was all Greek to me. But I do think I get your last statement. When the vehicle is stationary, It seems to wander a lot and when it is actually moving, it tracks more precisely on the map.
So all was well today and I set it for a 25? lap waypoint mission. Was working great and I stepped away to get on a conference call then looked out the window and it was gone.
It showed on the map as no longer on the course. I went outside and found it in what seems to be it’s favorite resting place, the fire pit. Not sure what happened but I did grab the log file. Not sure exactly what to look for in here but I figured I’d look for some weird roll and pitch as it had flipped on it’s lid and think I found the accident around line 3604898 at 2022-07-12 14:48:17.620. Can anyone tell me some good things to look at to see if I can figure why it went off course like that? https://www.dropbox.com/s/ue4p2vhtm41akn7/2022-07-12%2013-06-09.bin?dl=0
I tried to rearm and resume the mission and it was not going the way it should and I had to get back to work so I just ended it.
@dkemxr Looking at that mess, I see that is not one mission but that is over a long period of time where I made multiple adjustments to the course. Also, I was in manual mode for a bit, screwing with the deer in the back yard lol.
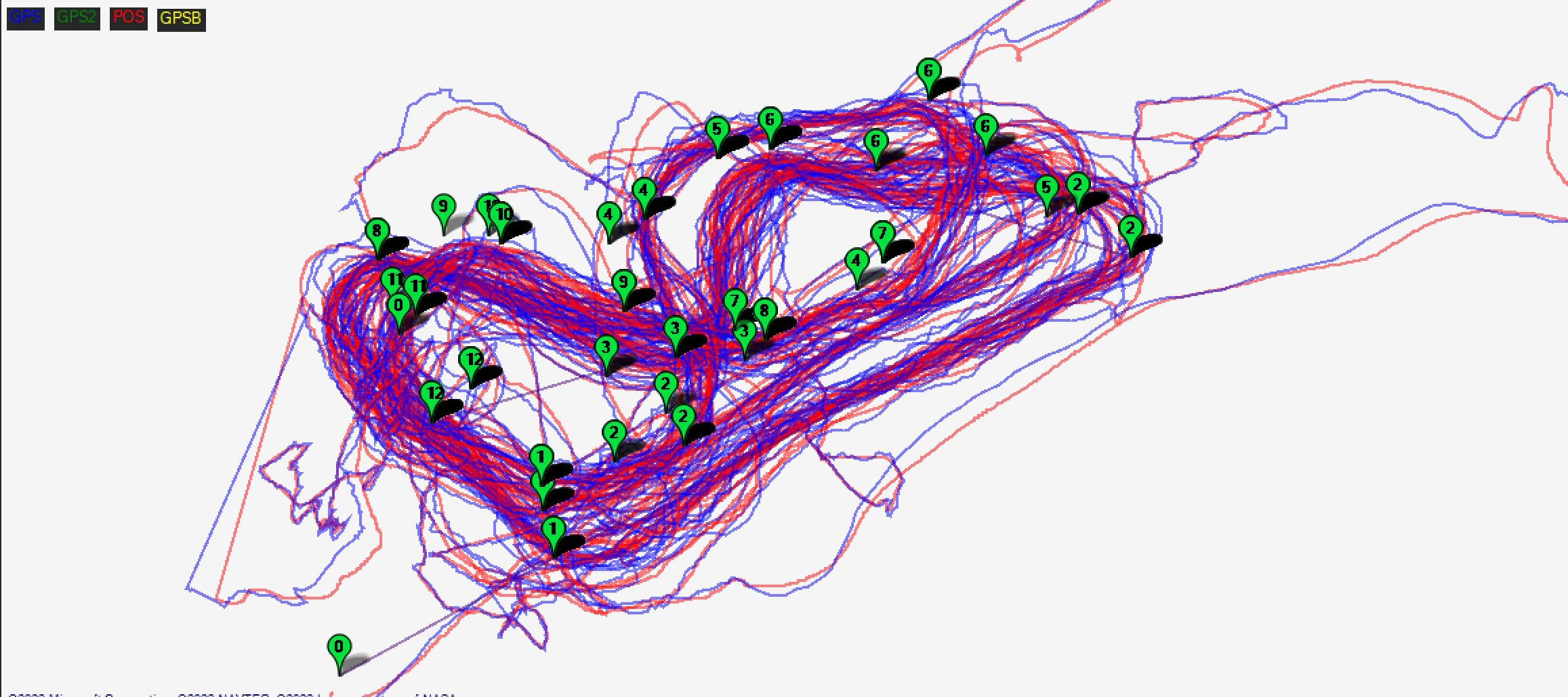
I did learn something last night. I sped up the truck to 1 meter/sec and the tracking actually was better. Ran 25 laps with no issues and no fire pit. I threw it back out this morning and did another 25 with no issues. Here is a better looking track. The lower part of the 8 is around 28’ ish. Also very bumpy and my whole yard is on a hill. Welcome to Pittsburgh where everything seems to be on a hill.
Not too bad! I tried several thing to try to improve standard M8N GPS positioning. Selecitng different Sat Constellations, Sbas or no, update rate. Tried saving waypoints manually by driving around using that feature to save them in a Mission. Nothing really made a big improvement. Even during the lockdowns when I could drive right down the middle of a dirt road by the house the next day it might wander into a farm field. When my Rover stalls out from hitting something the Spur gear will often strip. They are cheap mechanical fuses so I don’t worry about that but I have replaced many of them!
I’m not sure how to do anything specific with selecting the satellites. I was able to do a passthrough by doing a crtl-f and doing MavSerial pass thru then connect through Ucenter but once I’m in there, I have no idea what to do…
Similar to what you experience, My mission seems to slide to the left or right in my back yard. The shape of my mission stays the same but the whole thing can shift to one side of my yard or the other. Almost seems to follow the time of the day for what’s that’s worth.
I have messed with many settings to try and reel this in as much as I can. I’m going to run this same mission several times today and see if it stays where it should or go drifting off somewhere again.
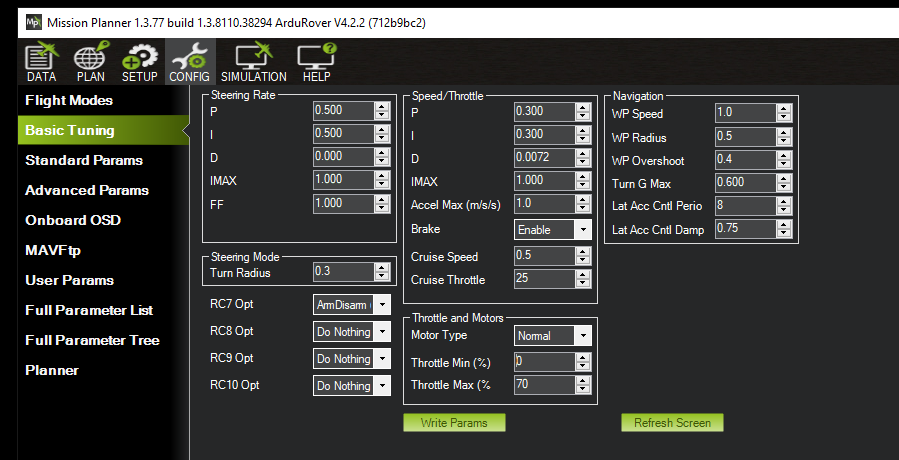
Here is where I have my PIDs and such at the moment. The vehicle I am running is a stock Axial SCX10 Deadbolt. I just stuffed a 3S 5000 Lipo in there. Frsky X4R receiver and an ebay Pixhawk 2.4.8.
I wouldn’t bother with Ucenter. It will be overwritten when the Flight Controller boots anyway using default parameters. You can set the Sat constellation to use with the GPS_GNSS_MODE parameter. GPS, SBAS and GLONASS seem to work OK for me and I’m in the US also.
Very cool. I didn’t know about that. Time to do some more experimenting.
I am eventually going to transfer this equipment to a boat but wanted to learn at home and not on the water