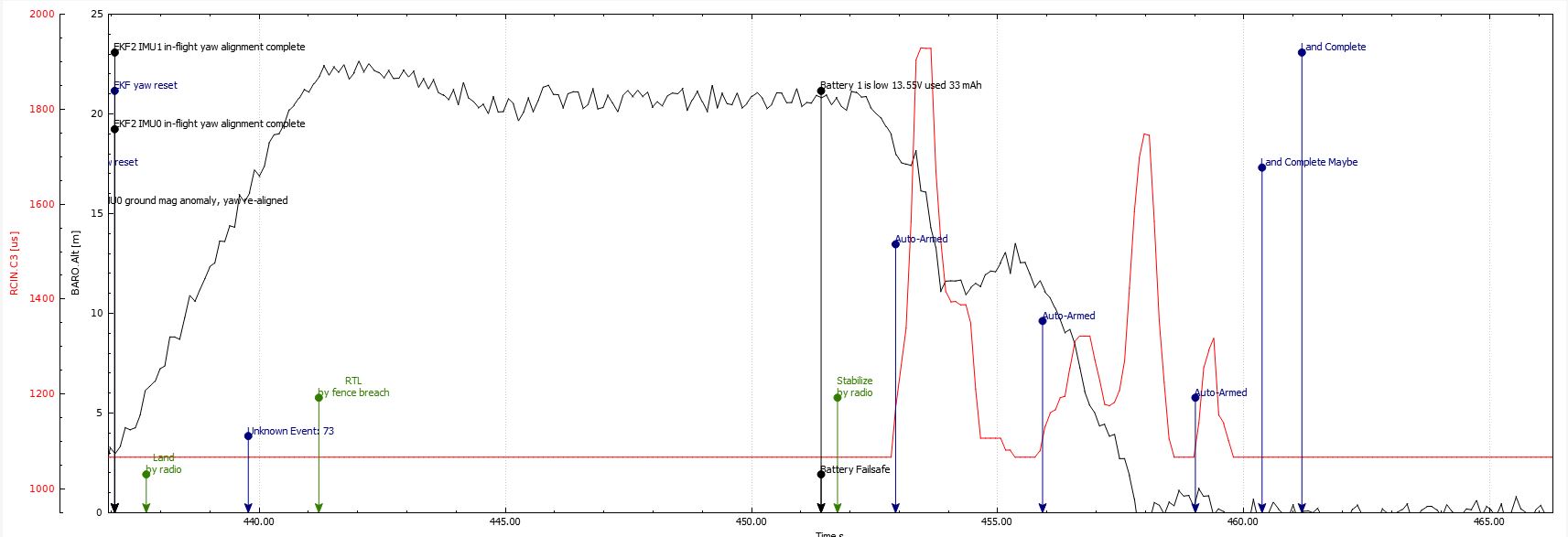
Hello everyone. Today I did the first test flight with my newly built. Everything seemed OK and I lifted off the ground. The machine went up to about 20 meters, the setting in the digital fence for the test flight. When tried to land it down, nothing happened. I went over to Stabilise and managed to land. Hope some of you have time to look at the log file.
The take off was made with Loiter and I newer change the mode. The drone accelerates upp to the max height and then stays there until I switched to stabilized and then landet.
The way that the drone performs the take off was strange, no response att all from the stick.
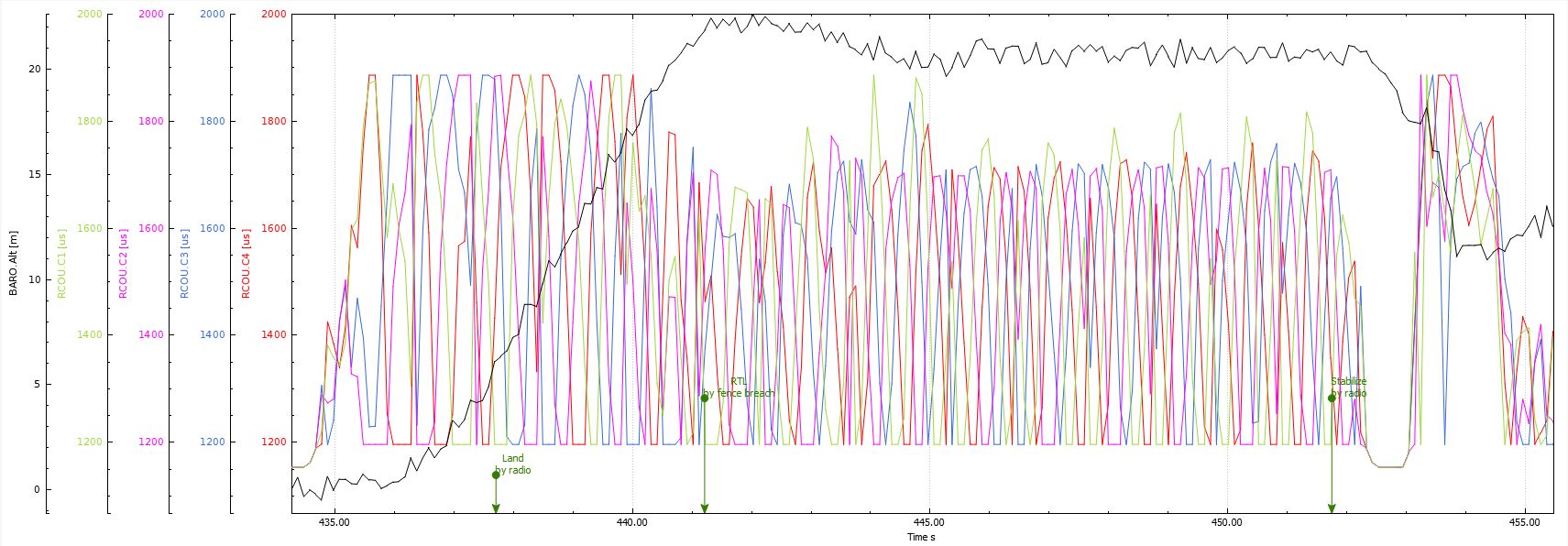
Your motors are cycling badly, kind of surprised this was flying. Describe this craft and it’s components. The 1st thing you should do is to follow the basic tuning guidelines for your craft before flying again. Then launch in stabilize and hover in AltHold for a minute or so and post that log. https://ardupilot.org/copter/docs/tuning-process-instructions.html
Thanks Dave for your prompt response.
A little tricky that the machine went up to 20 meters when I only wanted to lift a few meters from the ground. The machine accelerated upwards even though I put the lever down.
In my first flight, I have the habit of first testing that everything works as intended before optimization.
I enclose some pictures on the machine.