Greetings,
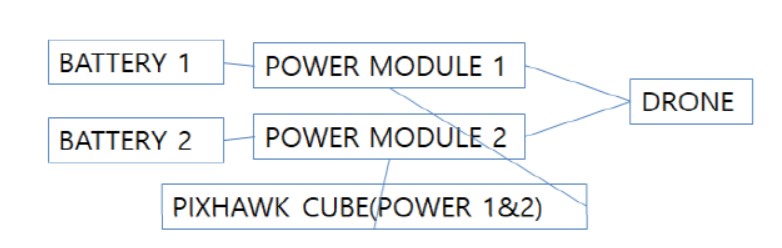
I am requesting assistance with setting up the power module. Specifically, I want to set the power module to print values precisely for the current value used in the calculation for compass-mot of my heavy overspec copter. However, there is something weird in my flight log. Please take a look at the picture below:
[Picture]
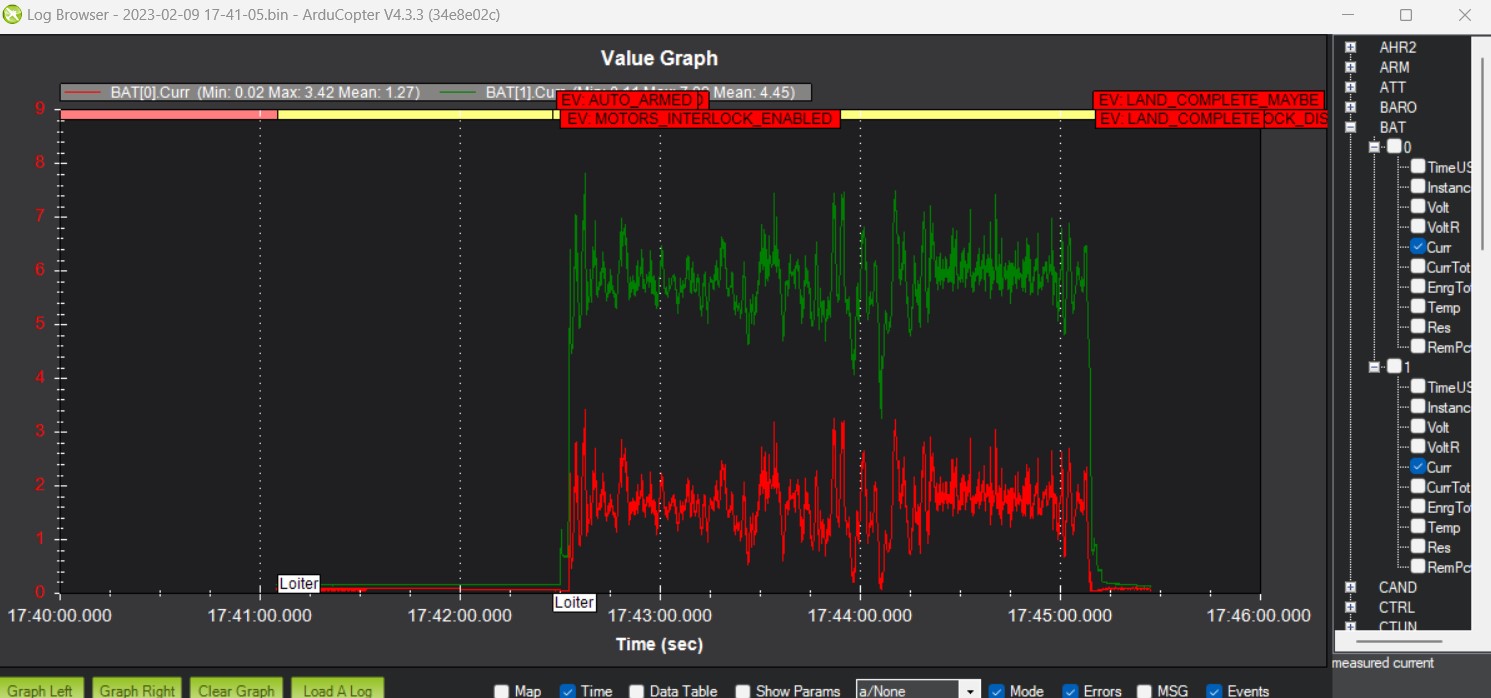
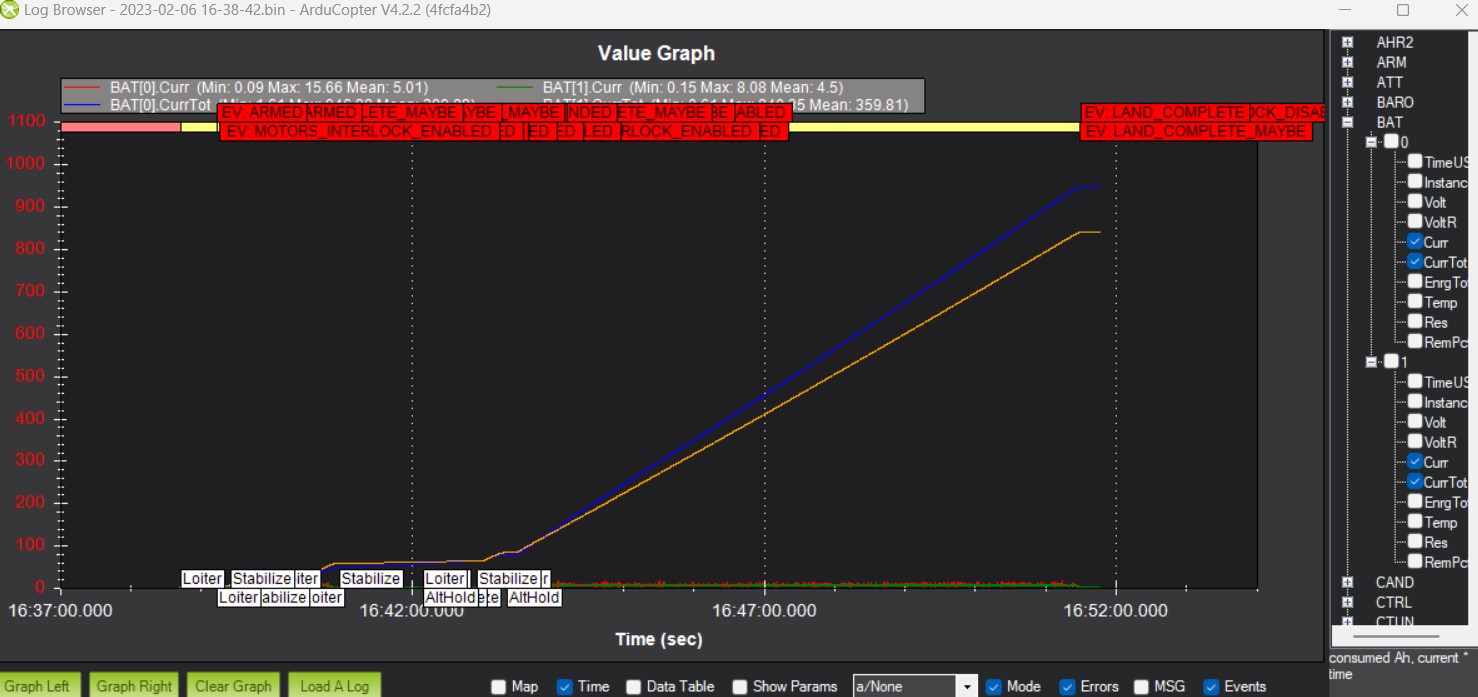
The green graph shows the current value from Aliexpress power module, which seems to be right.(this copter should consume total 12A, so each power module should consume about 6A) while the red graph shows a value different from the actual value(the Pixhawk Cube power brick mini), the module was included in the Genuine Pixhawk Cube Orange from my local reseller. Please note that the red graph is done with default parameters (BATT_AMP_PERVLT 39.877).
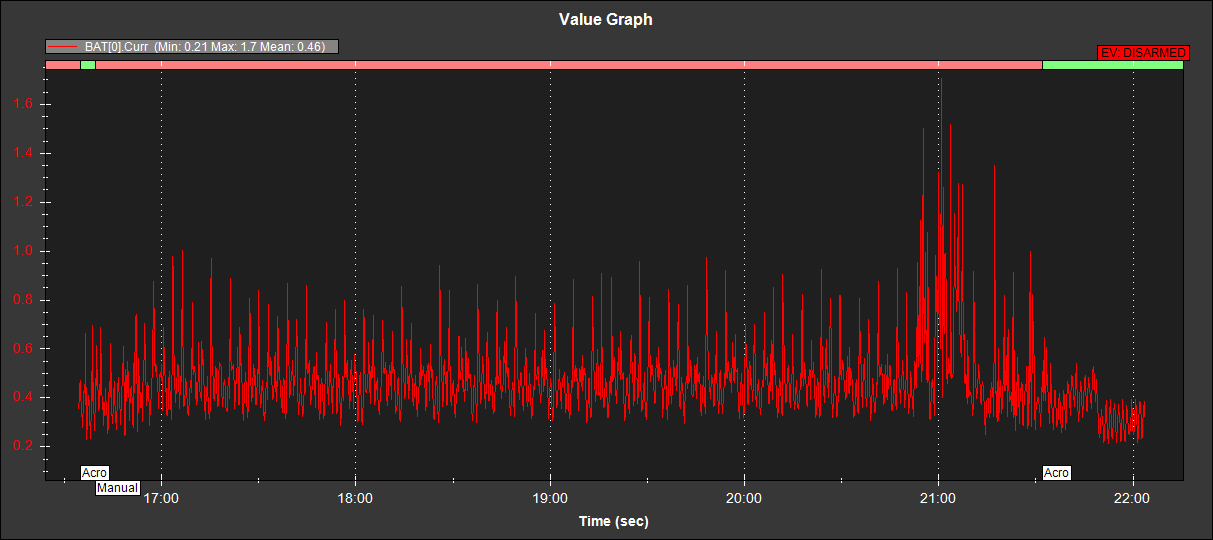
As you can see, the graph shapes are very similar, so I thought that setting an offset for the red graph would solve the problem. However, when I set the AMP PER VLT to the value calculated with this formula: “New Amps/volt = old amps/volt x charger mah ÷ logged mah”, you can see that the value is not offset with the same shape; itss range becomes weird. Please see the picture below:
[Picture]

The adjusted red graph value is too weird, and I had to set the BATT_AMP_PERVLT value over 120 for the genuine power module(the BATT_AMP_PERVLT is 39.877 originally). it is weird BATT_AMP_PERVLT value for geniuine power brick mini.
[Picture]
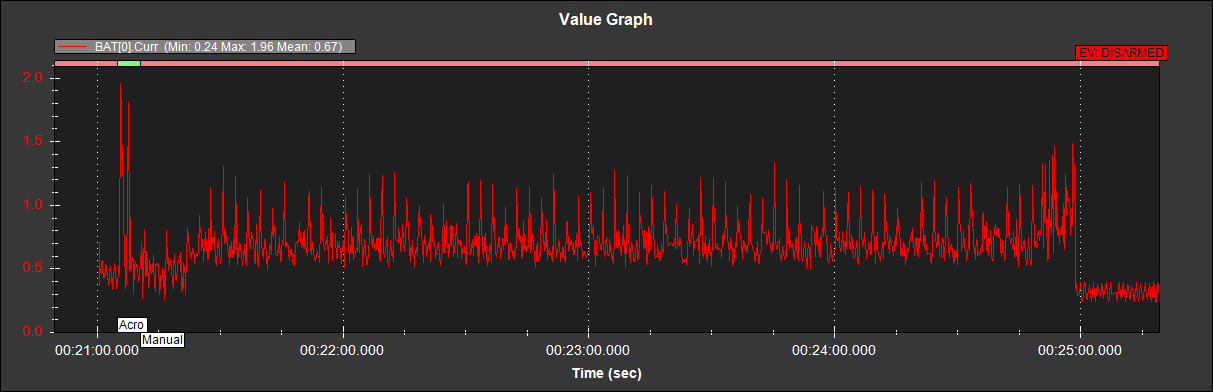
As you can see from the picture above, the total current has become good after I adjusted the setting value, and I can check that the two power module values are the same. However, the “current value” range become weird after setting for correct “total current” value. it become somewhat weird as you can see in the second photo.
There is an offset option only for voltage now, and there seems to be no offset option for current. am I understood correct, there is no offset options? If there is an offset option for current, my problem will be solved well. Does anyone have any ideas on this?
[Information]
-
FC used: Pixhawk Cube Orange
-
Copter type and size: Quad (Martin TL 4008 * 4, overlapped 14-inch props), Reptile 550 (TBS Discovery counterfeit), 6S LIPO 2600mAh * 2
-
Special note on this copter: I installed Tarot Martin 4008 and 14-inch props, which are too much overspec for this size of copter. I made each motor’s height different to achieve props overlapping because I want to lift heavy things with a small size on purpose. Please don’t think the current value is high and weird. If you see my flight log and suspect that the current value is too high for a 450 quad, you are right. I know it is a dangerous thing, and all responsibility is on me, and I will take any precautions for flying this copter. I will crash anytime it goes wrong with any way I can do. I will change my mode to stabilize mode to crash my copter and fly in no one walks around. For your reference, its flight performance is great until now. I have flown it many times with many prop setups, and with current prop setup, I have already done several flights. If you see in the log, you can say the copter is not autotuned yet, but thanks to this forum, PID value adjustment and harmoni notch filter and compass calibrations has been already done.
-
Flight log and parameters link:
As my latest flight log and parameters only show one power module’s value(I changed the settings to show current on only one power module.) and do not contain this problem, I cannot attach them. The PID value adjustment, compass calibration, and other settings have already been done on my copter, so you don’t need to advise on old values. I just want advice on the battery value.parameter file :
20230208 parameters before autotune.param (17.7 KB)flight log :
https://drive.google.com/file/d/1nf1Ixp2tfOEFzIscAcxXKdqDDMMUsSQk/view?usp=sharing