Betaflight has a Dynamic Idle feature that can improve turn responsiveness, low throttle stability, and prop wash handling for FPV drones. Is there a similar feature in AC.
Thanks in advance
Betaflight has a Dynamic Idle feature that can improve turn responsiveness, low throttle stability, and prop wash handling for FPV drones. Is there a similar feature in AC.
Thanks in advance
I was looking for that too, as I am getting propwash when copter breaks or descends.
Seems MOT_SPIN_MIN is the parameter to change here.
what does the feature do in terms of actions taken by the flight controller?
My understanding of dynamic idle in BF is that it prevents slowing props too much in situations where air flow through prop is decreased or even reversed like on heavy breaking or fast descending.
What for? Well… slowing or reversing air flow causes prop effective angle of attack to rise leading to prop stall and very unpleasent turbulences and vibrations.
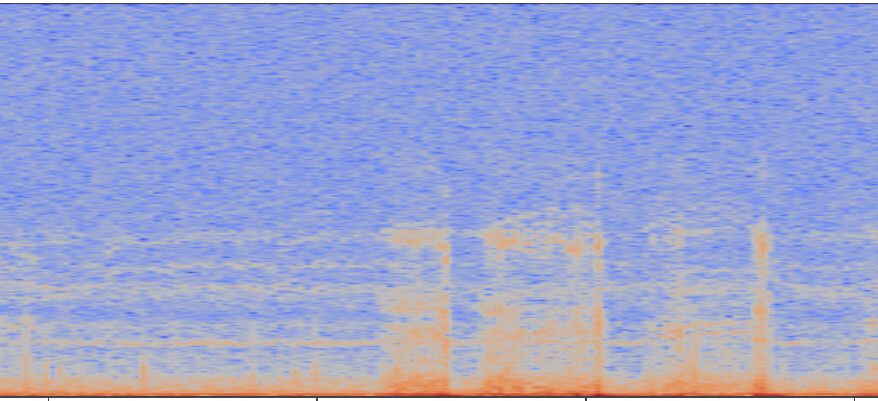
This is how it looks like on my drone, after notch filter - wide spectrum vibrations.
And according to description MOT_SPIN_MIN seems to be doing something very similar to dynamic idle in BF.
I have not studied BF’s code, but the word “dynamic” suggests that BF’s equivalent of MOT_SPIN_MIN may change upon flight conditions based on some heuristics. However, Ardupilot’s frame code is quite sophisticated, it may adjust the throttle based on what’s available and what’s requested, and this all might just do the thing, especially if attitude has a big enough priority (the ATC_THR_MIX_* things).
(If someone has a better understanding and I was not correct, please let me know)
I think “dynamic” part in BF is related to way of setting this. in BF is set by RPMs, so BF keeps throttle to not go below RPMs. in Ardupilot MOT_SPIN_MIN is just throttle %, but at the end effect might be similar.