Hello everybody Hello everyone
I made a quad copter for some tests!
Now I want to apply ocusync.
There was a video on youtube, but I could not understand what it was.
If i apply ocusync to pixhawk, i can see it in goggles.
In addition, I would like to monitor the quadcoptor’s condition here in the Mission planner.
I watched the video of that youtube.
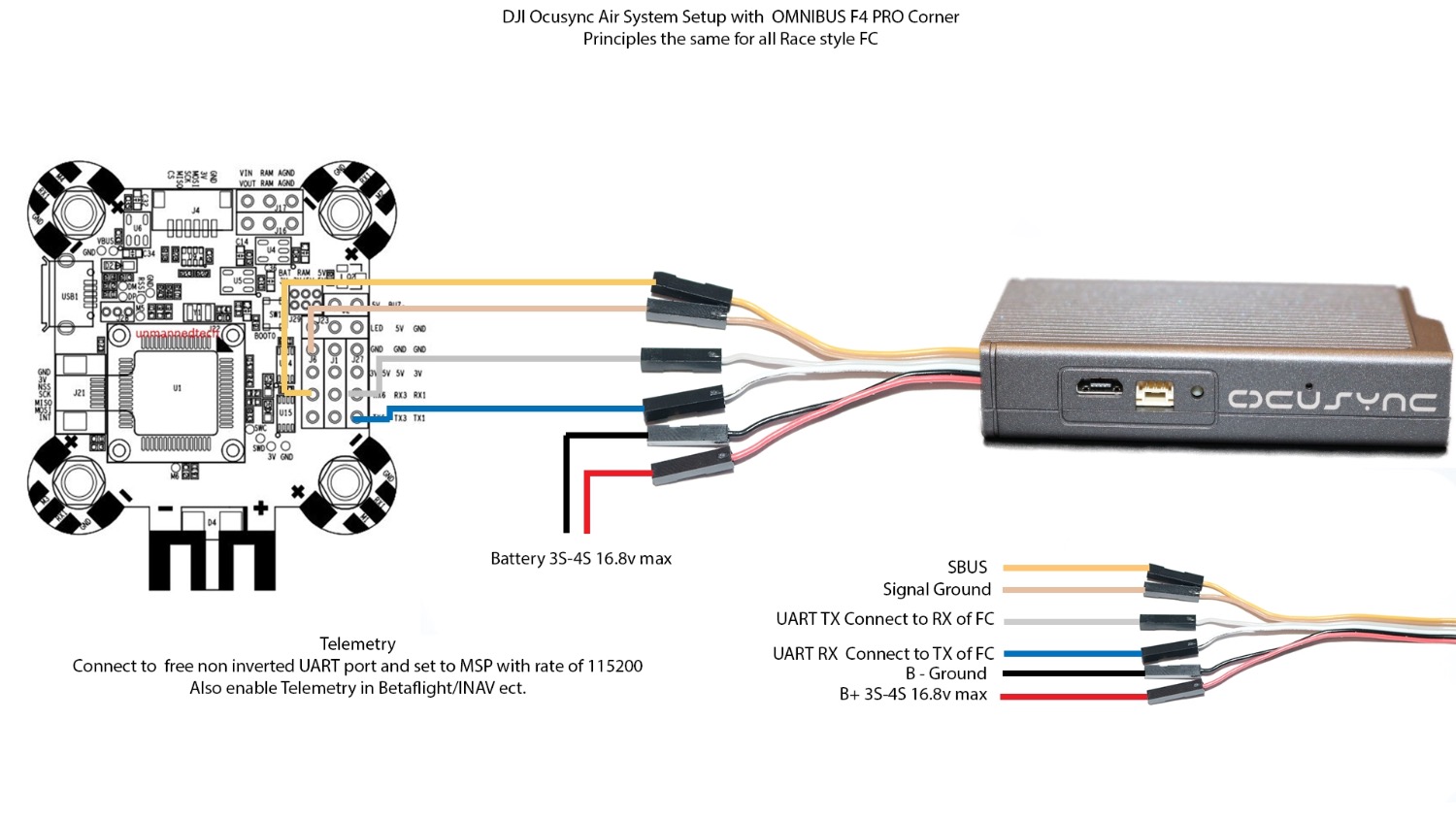
It looks like the telemetry port is already assigned to ocusync.
So how do I connect a telemetry for monitoring mission planner to pixhawk?!?!
Or, if ocusync can act as a telemetry, what does the GCS-accepted telemetry use?
It’s hard to start with wiring in the first place.
Whereas sbus should be regarded as a pixhawk,
There is no information on whether RX TX is rx tx on the telemetry port or Rx tx on the other port.