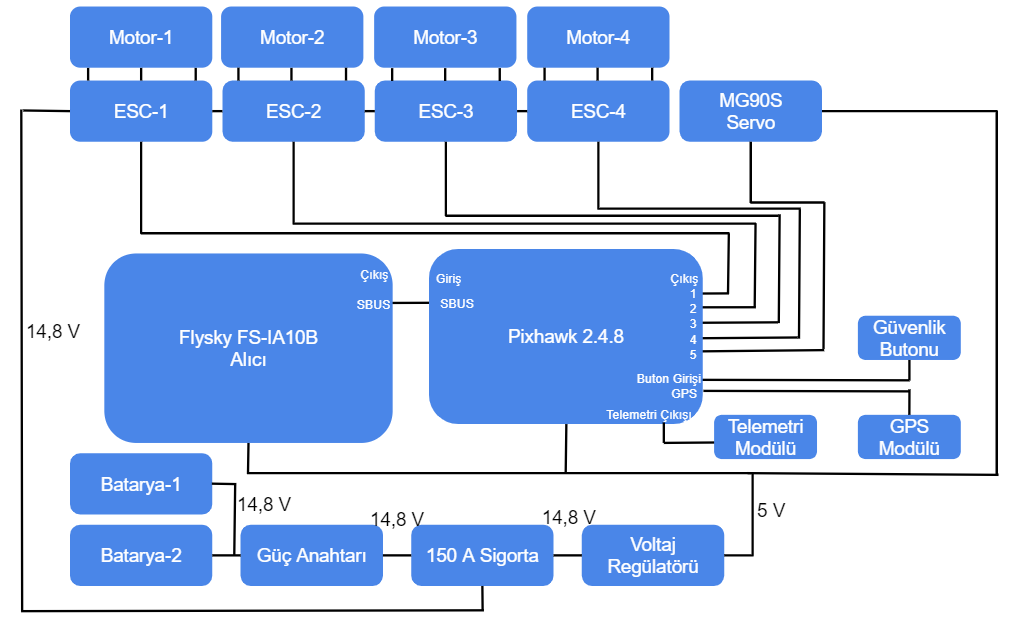
I designed and drew an air boat with pixhawk 2.4.8. As you can notice that there will be no transmitter and receiver because I will control it by ground control station. I would like to steer my air boat by increasing the speed of one of the propeller so steering(maneuvering) will be done by speed difference of two propellers. Actually design is not fully ready. Maybe It will run with 3 propellers or 4 propellers. I am newbie about these duty, so I am not completely sure about the pieces.
Here are my questions;
1)Is power module necessary or not?
2)Can power distribution board work with only two propeller? I mean that does it need to weld every output on pdb?
3)Does steering done as written above with the help of speed difference of two propellers?
4) If I want to increase the number of propeller, do i just need to weld its esc(s) to the power distribution board and connect its other cable to the pixhawk?
5) Are directions of rotation of propellers correct, if boat runs with 2 propellers? (One of them is cw, the other is ccw)
6)Is there any module or connection lack or necessary?
1)power module isn’t necessary but it is recomended
2) I think you don’t need power distribution board becasue you have 2 esc you can connect each other directly and your bec from power module so PDb is useless for you
3-4-5) I don’t have any information about boats
6) it looks good
Thank you so much for your reply Mr.Emir but I would like to learn more about the power distribution board. How can I connect 2 esc to pixhawk? And if I don’t use pdb, how can I use power module because as you said it is recommended. Additionally, I don’t know what you mean with BEC. I don’t understand it. Thank you again.
You can connect ESC’s + and - wires directly so battery + esc1 + and esc2 + wires connect. and battery - esc1 - ESC 2 wires connect directly ı will share my old drone schema. Power module duties are to measure battery voltage and current, and regulate battery voltage to 5v for pixhawk (it is means BEC) also PDB can do that. But ı prefer a power module because in your schema PDB can’t measure voltage and current. but power module can do that pixhawk will get 5v gnd and current voltage values from one socket
If you want to connect two ESCs to one battery, use a PDB. Especially if you plan to add more ESCs/motors in the future.
You should check if your ESCs can be programmed for forward/reverse operation, because that is what ardurover/boat expects. BLheli or car ESCs support bidirectional operation.
Setup two outputs of the Pixhawk as throttle left and throttle right and ardurover will use skid steering/differential thrust.
If you want to use more motors, you can use y-cables to connect the ESCs to the pixhawk, or configure more outputs as throttle left/right.
Counterrotating props are fine to cancel out torque effects when going straight. You can also use the torque of the props to aid turning: right prop clockwise, left prop counterclockwise (viewed from behind the boat). This way, if the right prop speeds up to turn the boat left, the torque also pushes the left side of the boat down, causing it to roll into the turn.
Hello Mr./Mrs. Count. I would like to ask something step by step. You said use a pdb but other user said that pdb is useless in this design as you can see above. Why you said use pdb?
And esc(s)… What is the meaning of esc(s) are programmed for bidirection? Are normal esc(s) different? I mean if I buy a normal drone esc, it means it doesn’t work?
You said ardurover use skid steering. It means that to turn my boat, one propeller will turn another way that is why you said bidirection esc, is it true? If it is true, if boat will use skid steering; it will be very bad because of the stability, right? I actually want to steer my boat with speed of propellers not with their direction of rotation, can’t I do that?
Lastly you explain something on 5th. But you said causing it to roll into the turn. Is it a problem for me?
And also, there will be no transmitter and receiver. I want to manage it by ground station. I will define a point on the map, it will go autonomously. While it doing that, what will be the maneuvering method? Will it change the speed of proppeller or change the direction of rotation of propeller?
PDB: You have one battery with one connector and 2 or more ESCs with one connector each. Now you can either solder funky contraptions to get power from one battery to multiple ESCs or use a tidy PDB which might also contain other devices like a BEC. (Battery Eliminator Circuit, takes the battery voltage and outputs i.e. 5V for servos, receiver, etc.)
That is why I said to use a PCB.
Skid steering: This is also called tank steering. This is a basic mixer (also used for elevons or V-tails on an airplane), which takes two inputs, in your case throttle (-1 to +1) and steering (-1 to +1) and mixes them for both sides of the vehicle: throttle + steering for one side, throttle - steering for the other. So it does both of what you mentioned above. For low/zero throttle one motor will turn backwards, enabling your boat to turn on the spot (pivot turn). At full throttle, full steering input, one motor will stop, the other will go full speed.
Ardurover expects bidirectional ESCs to be used. Its PWM output for zero throttle is at 1500us per default. This is about half throttle for airplanes and copters. Airplane/copter ESCs will not even arm themselves, if they receive a signal above 1000us or so.
You might be able to calibrate them to use 1500us for zero throttle.
To point 5.: Depending how your boats hull is designed (monohull v-shaped or flat, catamaran etc.) you can influence the roll of the boat during turns by using the propellers torque. Either to keep the boat more upright, or causing it to roll more. This magnitude of this effect will depend on the hull design, weight of the boat, prop size etc.
Thank you so much Sir. But I want to sure that, if I buy bidirectional esc, can i steer it by speed difference of propeller? I am really sorry about my questions. I don’t want to steer it by turning the propeller reverse.
You do not have to be sorry for asking. I just have to try to explain it better.
Some things just need some time to get your head around.
If you have bidirectional ESCs, there will be situations where one or both motors reverse. This is how skid steering works. I build several prop driven cars, boats, snowgliders and it works just fine with or without an autopilot. I guess it might be good, to be able to drive the boat backwards in some situations.
Using unidirectional ESCs will require some additional setup steps and the boat will only go forwards and turn.
Again thank you Mr.Sebastian. Now I understand you very well but mission planer can coordinate two bidirectional esc correctly? Because for example I gave a point to my boat on mission planer and this point is in forward-right side of current boat position; if mission planer try to turn the boat by reversing the right propeller to go there, I think there will be some rolling effect on boat hull because of air flow. That is why I actually want to steer my boat by increasing or decreasing the speed of propeller. Do you know that can pixhawk and mission planer do that correctly if I buy bidirectional esc?
And one more question, Mr.Emir wrote that ‘‘in your schema PDB can’t measure voltage and current.’’ Is it true? He recommend that use power module and take off power distribution board for 2 propellers.
You can allow the boat to do on the spot/pivot turns or not. Set PIVOT_TURN_ANGLE to 0 and your boat will always start to drive forwards before turning.
If you build your boat with the electronics connected together as displayed in your picture, the power module will meassure voltage and current.
A PDB is basically like a power strip in your house. If you want to connect multiple devices to a wall outlet you need a power strip.
Just like there are power strips with USB charger, powermeters etc., you can get PDBs with a power module built in, with one or more BECs for different voltages and so on.
Thank you again Sir but most probably I tell you wrong because I don’t think pivot_turn_angle is my answer. I mean that if I use bidirectional esc, can mission planer turn my boat by changing the rotational direction of propeller or by increasing the speed of propeller. For example my bot will go to a point that is placed 35° angle than current position of boat. Does the pixhawk change the direction of rotation of one or two propeller to reverse or does pixhawk change the rpm of one or two propeller to go there? Again and again thanks a million.
You will have to understand how skid steer mixing works.
Ardurover generates steering and throttle values in the range of -1/+1 (which get mapped to PWM values from ca. 1000 to 2000us).
In a boat with screw/propeller and a rudder, throttle output goes to the motor, steering output goes to the rudder. If the there is no throttle, the boat will not move or turn.
With a skid steering vehicle, throttle and steering are combined in two or more props/tracks/wheels.
Instead of trying to explain in writing, I made something for you:
I hope this helps to understand how skid steering works. It does not matter if you move the stick or the autopilot, it always works the same.
Sir I know I am disturbing you so much. I guess I understand it. In your drawing, Does the area of under X-axis on motors side mean propellers are rotating reverse, right? For example, when stick coordinates is (0.2, 0) motor 1 will rotate normal direction of rotational but motor 2 will rotate opposite direction than setted direction, is it true? That is why I need bidirectional esc. Sir what if I put unbidirectional esc? I just wonder that and I want to learn that how boat will turn when unbidirectional used? And I hope last question; Is there any method to turn the boat other than the skid steering? and If I use 3 or 4 propeller, does algorithm behave as same?
Not enough to say thank billion times. You are saving my life…
As I said, ask away, I will answer if I have time.
You got the interpretation right.
If you want to use unidirectional ESCs, you will have to either have to calibrate them to accept 1500us as zero throttle, or configure ardurover to use 1000us as zero throttle. I never tried the latter and all the logic in ardurover works with the assumption that the vehicle can go forwards and backwards.
This will make the boat unable to reverse. Steering will still work, just not with reversing props.