bat7312
May 1, 2023, 1:09pm
1
Hello!
Above stable 4.1.7 firmware BRD_PWM_COUNT removed
Electronic devices
2023-05-01 오후 8:24:06 : EKF3 IMU1 MAG0 initial yaw alignment complete
Brd pwm count is gone, you just select each chanel now rather than choosing a number of pwm, the information is in the docs
1 Like
dkemxr
May 1, 2023, 4:46pm
3
And the handy SERVO_GPIO_MASK
bat7312
May 2, 2023, 1:41pm
4
Thank you for your reply
RC7_OPTION (28) for relay 1
GPIO can relay mapping AUX(50-55) and OMCU MAIN (101-108)
For example, the Pixhawk default defines set up AUX OUT 5 (pin 54) and AUX OUT 6 (pin 55) as the “First” (or #0 ) and “Second” (or #1 ) Relays respectively.
SERVO_GPIO_MASK will help
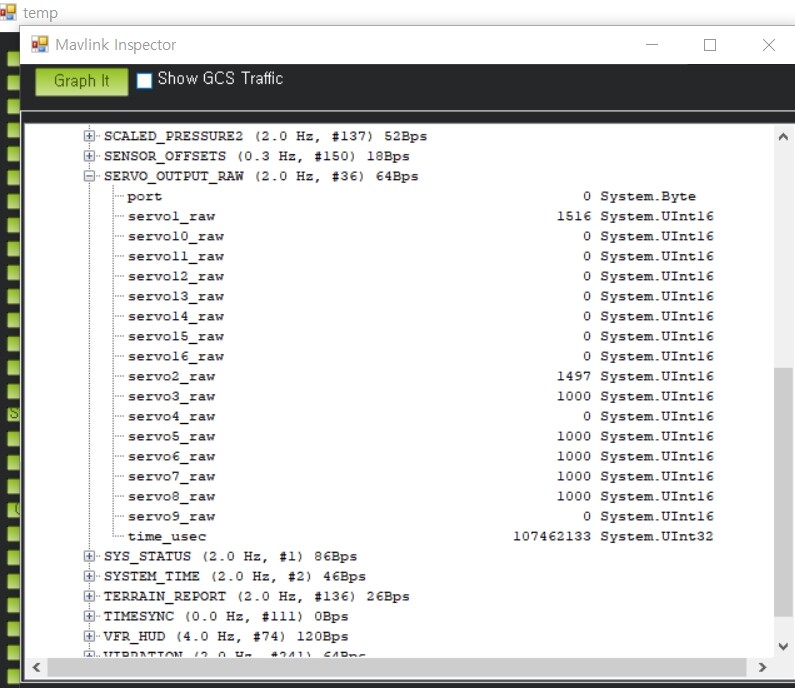
But arduplane 4.17 firmware show correct servo
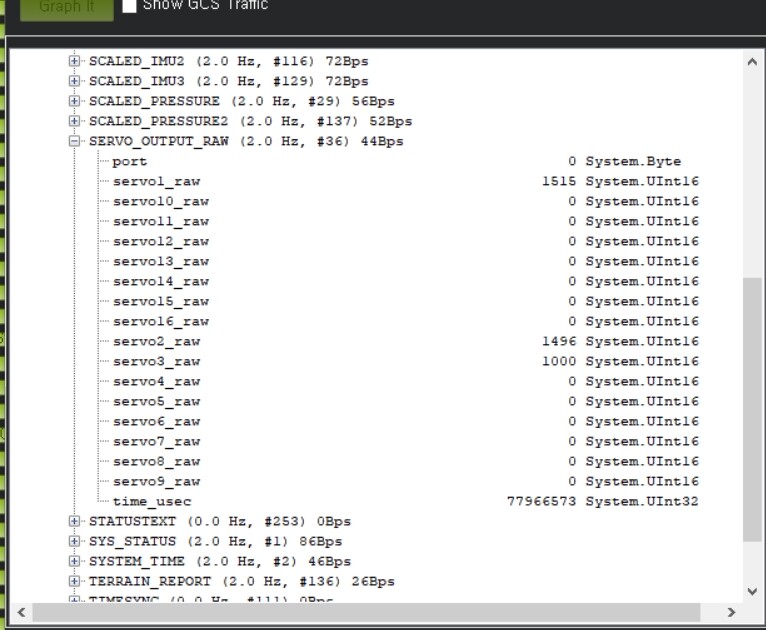
arduplane 4.17 above show only three
Why this happen when i installed arduplane 4.17 firmware above
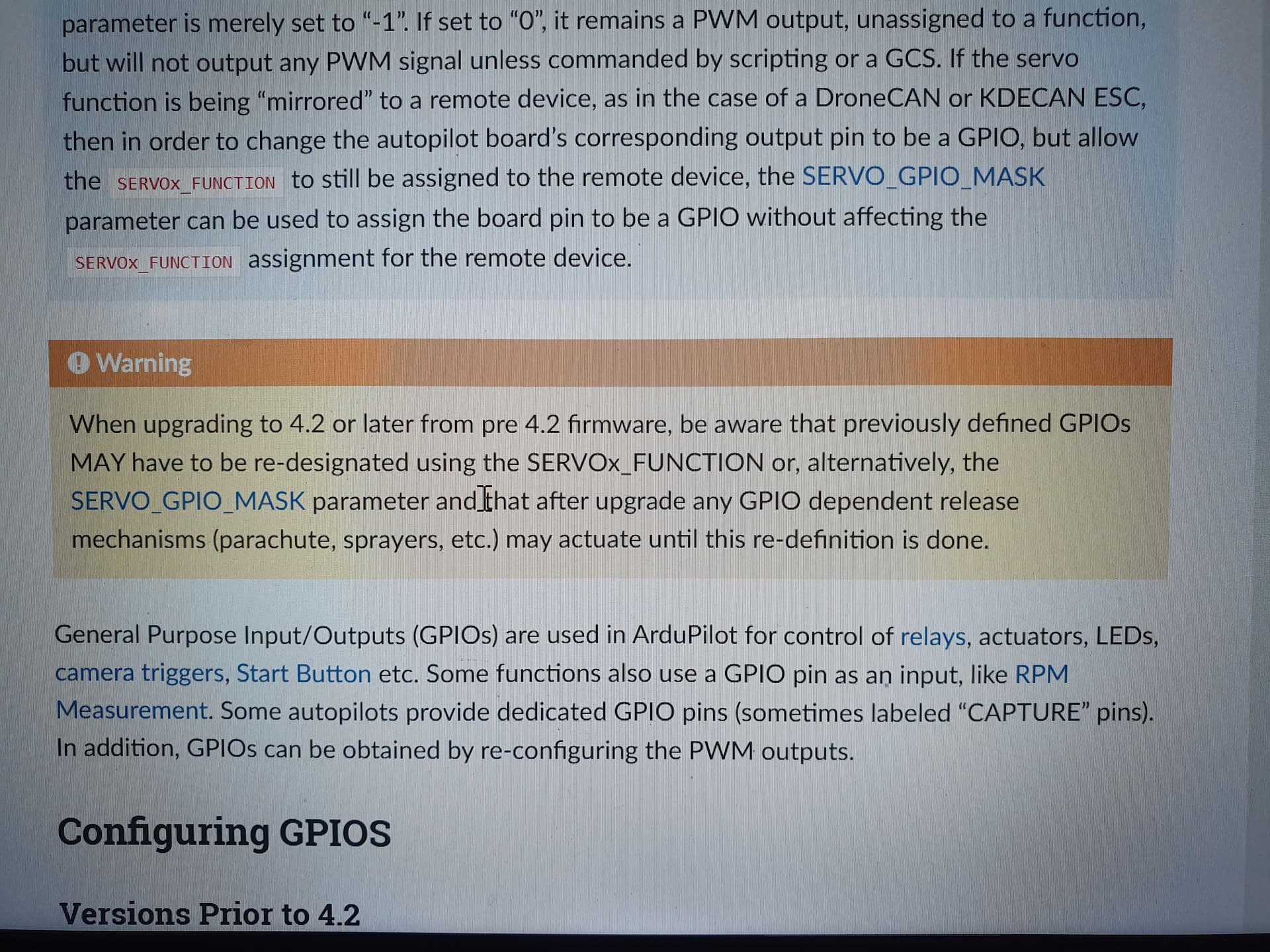
Is it because of this? Maybe with the later fw you can re-designate using the servx function param as the doc suggests
bat7312
May 3, 2023, 12:56am
6
Thank you for your detail reply.
I install FMU3V board,It work fine in any arduplane firmware version
In CUAV X7+ , Only 3 SERVO_OUTPU is appear (VTOL 4 motors missing)
In FMU3V hwdef.dat also define BOARD_PWM_COUNT_DEFAULT 4 removed in arduplane 4.17 above version
WHy 3 SERVO_OUTPU is appear and VTOL 4 motors missing in CUAV x7+
dkemxr
May 3, 2023, 1:48am
7
I’m not sure what you are asking but that Flight Controller does not have a IOMCU. It’s nothing like a board using fmuv3.
bat7312
May 3, 2023, 5:41am
8
arduplane firmware 4.17
arduplane firmware 4.17 Above
I’m not a programmer
If there is no solution, Should I return to primitive times downgrade firmware ?