Hello guys, i’m doing a project that i need my rover to move forward until a certain point is reached, and then, go in reverse without turning 180 degrees. I saw some simillar projects that use the DO_SET_REVERSE command. Is it possible to use this command in GUIDED mode and send the MAVLink message to use this function using a lua script?
Hi @gsouza ! Do_Set_Reverse works in auto mode but I don’t think it works in guided mode.
Anyway, here’s an example lua script to send mavlink message with COMMAND_LONG using lua:
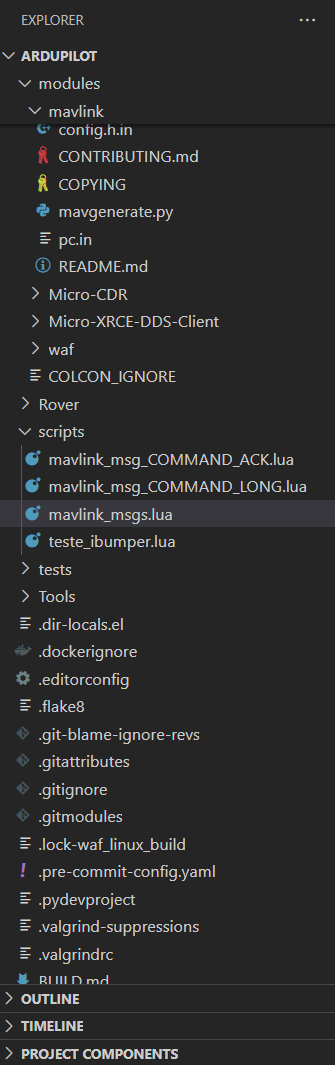
Just copy ardupilot/libraries/AP_Scripting/modules to your scripts folder
local mavlink_msgs = require("MAVLink/mavlink_msgs")
local MAV_MSG = <Command ID> -- Command ID for Mavlink message, set it to '194' for DO_SET_REVERSE
local MAVLINK_CHANNEL = 0
local function send_command()
-- example param
local param1 = 0
local message = mavlink_msgs.encode("COMMAND_LONG", {
target_system = 1, -- Target system
target_component = 1, -- Target component
command = MAV_MSG, -- MAVLink command ID
confirmation = 0, -- 0 for no confirmation
param1 = param1,
param2 = 0,
param3 = 0,
param4 = 0,
param5 = 0,
param6 = 0,
param7 = 0
})
-- Send the message
local mav_send = mavlink:send_chan(MAVLINK_CHANNEL, 76, message) -- 76 = ID for COMMAND_LONG
end
return send_command()
I’ve seen this issue right here. I guess i should be able to use this command in guided mode, as i’m using the newest firmware for ArduRover available.
Anyways, i will try to run some tests right here to confirm if this is even possible to use in guided mode.
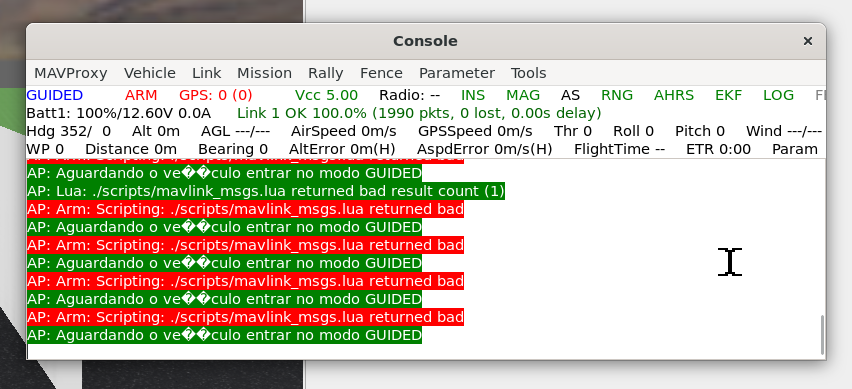
Could you help me understand why this error occurred? I added the required scripts on the path you gave me to my scripts folder, and then this error appeared.