Hello, I am working on setting up a Mavlink Led and a 500mw telemetry radio. There is only one teleport available on the pixhawk i am using so I have made a y splitter cable the problem I am facing is the led work fine but when trying to connect the telemetry to GSC it stuck on STAT_RUNTIME.
Telemetry works without the cable connected to Mavlink LED Board.
Is there any possible way to solve this problem while still using a single teleport for both devices.
Hello, Stephen, i have tried removing the tx cable from the led input connector but the problem I am facing is it stays in the receiving mode until I dint connect both the rx and tx wire and once both wires were connected the signal LED become solid and at that point if I remove the tx cable the led remain solid and the mavlik LED works fine and I am also able to connect via telemetry and there was not error this time but this solution only works after this procedure if I unplugged the battery I need to repeat it every time.
Ahh, ok. So the LED board must need to initially communicate with ArduPilot before it starts working. Likely to request a specific packet stream.
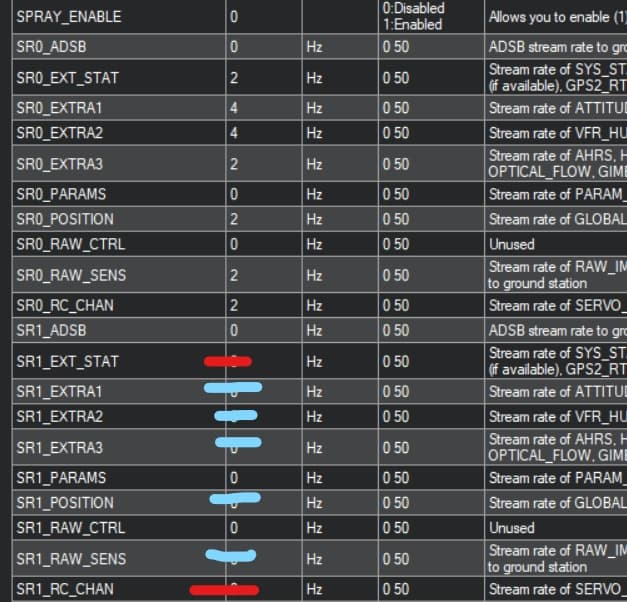
To force the telemetry port to send all packet types, go to the parameters and ensure all the SR0_* and SR1_* values are not zero. If any are zero, set them to one.
ok, now the led is working without the tx cable plugged in but I want to know what difference it makes when I changed the values from 0 to 1, and does it affect telemetry perform bcz i can observe longer getting parameter time.
The SR settings tell ArduPilot which telemetry data to transmit and how often (in Hz), 0 being “don’t transmit”. These can (and are often) overridden by a GCS or other MAVLink device specifically requesting a stream.
In your case, the LED device is requesting a specific telemetry data stream from ArduPilot and will not work without it.
With all the SR parameters enabled, you are using more of the telemetry link’s datarate. You can disable the SR parameters one by one until you figure out which specific SR parameter the LED needs.
Hello i was trying to figure which para is associated with the LED and disable the SR parameters one by one but suddenly after a reboot the LED stop working properly and the flash red and sometimes read constantly they still are still seams connected and I am able to turn them on and off via radio switch but still after resetting all the para nothing change they still flash yellow and red
I tried to connect to the pc with the provided interface tool it shows this issue and I am not able to save new parameters
@xfacta@dkemxr@amilcarlucas Hello, Hope u doing well. it was all working fine as I was able to use led and telemetry both on a single UART port but after I updated to the latest firmware version the led goes off as soon as I plug in the ground telemetry. I have somehow discovered the SR 1 parameter which were were required to run the led without the Uart Tx wire plugin into the led tx port. I am unable to figure what has changed in the new firmware.
Please help me.
These are those params. I only need to change the value of the red one from 0 -1 to make both devices work.
yes, i have turned off the transmitting function to the device ( Pixhawk indication LEDs) so they were working fine but it gave an issue when I try to upgrade the firmware.
Both devices have to be using the same protocol, example Mavlink2.
The newest firmware defaults to Mavlink2 so you may have to specifically set a port to Mavlink1 if using earlier devices.