Hello,
I have drone equipped with Pixy cam, Pixhawk cube black. Camera i set according tutorials, message “Bad vision position” disappears  .
.
But during landing drone totally ignore the Beacon2 position. Could you please somebody advice me?
George
I have IR Lock sitting in bags for over 4 months I wish I can help you.
If I find the time I will play with it. Sorry, cant help at this point.
Hopefully someone will shortly. Hang in there.
Anyway thank you for your answer. I did fight with IR-Lock for several moths. Still no successful result. And on the tutorials it looks do easy. 
I hope somebody will help me.
Do you use lidar altitude sensor ?
No, lidar was not used. Is it necessary?
yes, without lidar, IR lock will not engage.
OK, thank you, I will test it and let you know.
Hi all, I installed lidar lightware SF11/c and it is working. Camera Pixy and lidar are looking down. Several times I did try precision landing with Beacon 2.1, but not success. Parameters from log looks good. Please can you help me? Log file is included.
Thanks
G
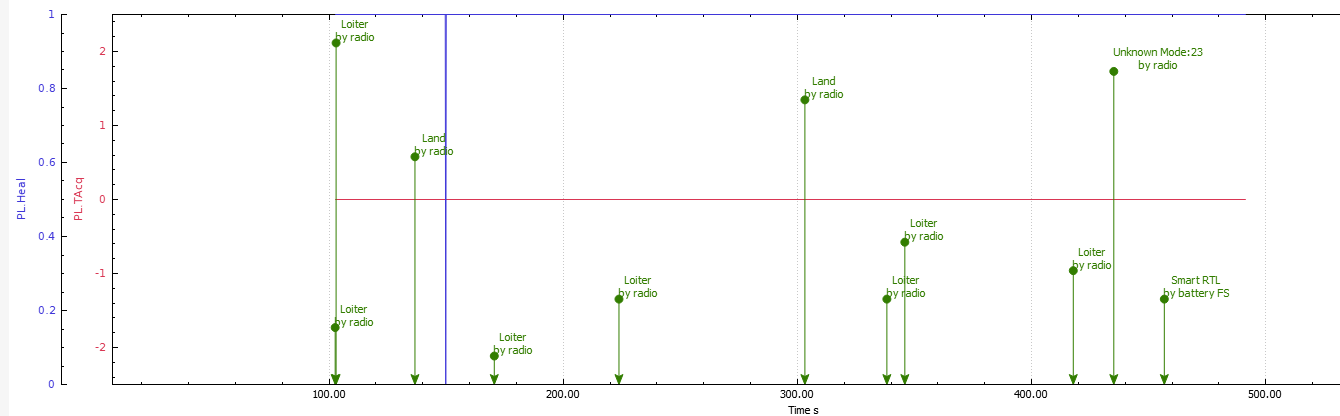
Target never acquired, which means that for some reason your IRLock sensor did not see the target.
Did you check the camera as described in this guide ? https://irlock.readme.io/v2.0/docs
Is it actually see the target ?
Your lidar also looks unheathy

Did you keep separation between lidar and pixy ?
Pixy and Beacon is set according manual. What do you mean “separation” between lidar and Pixy? I did setup pixy and Beacon on 12 m using usb connection to PC.
Any idea? What error I did?