First of all, the directions of the drone commands are reversed.
Forward is back, right is left, and vice versa…
I have managed to fly the drone with the opposite parameters, but the problem is that during the flight, for no apparent reason, the direction parameters change direction.
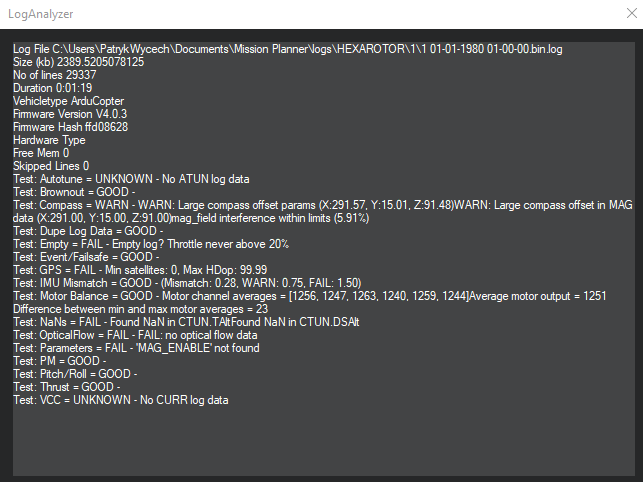
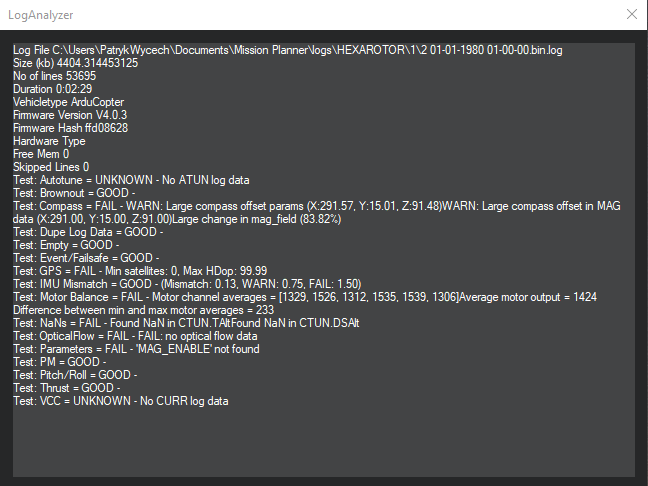
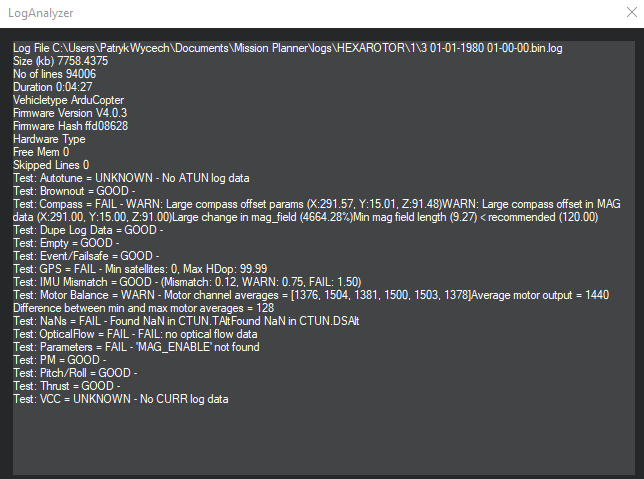
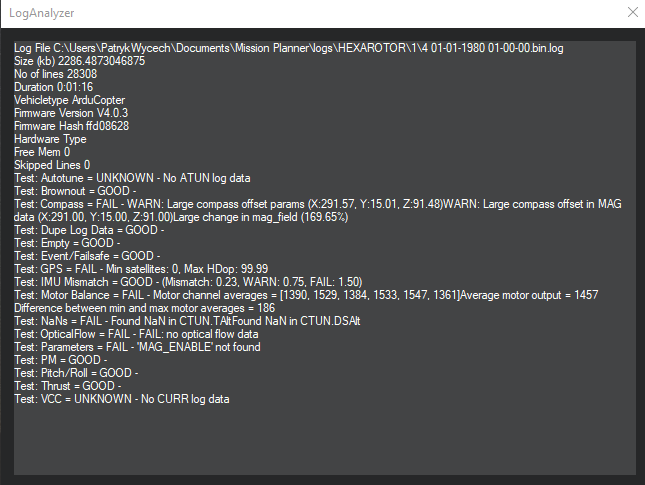
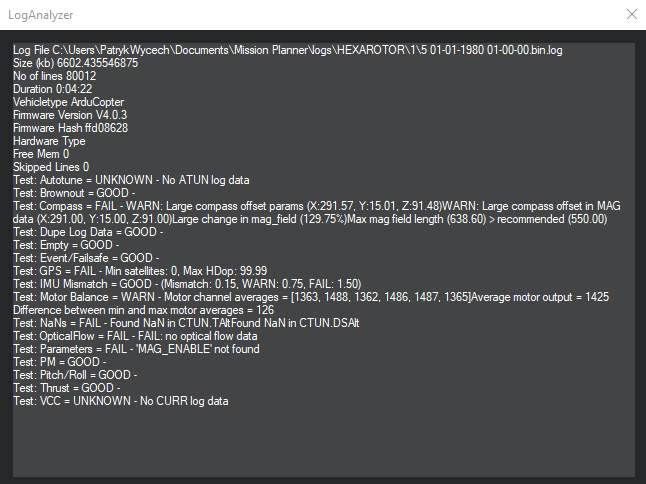
I have observed in the ArduPilot Auto Analysis that the motors sometimes give error (WARN or FAIL).
Auto Analysis is outdated and of little value. What Flight Controller do you have and how is it mounted? You may only have to set the board orientation.When it’s pitch and rolled does it respond properly in Mission Planners HUD?
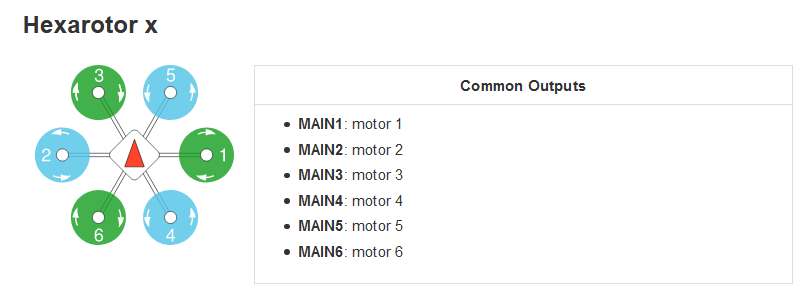
Thanks, I have a Hex Cube Flight Controller, and the arrow points to the right direction. The visualization in Mission Planner is correct (Roll, Pitch, Yaw), but when I fly everything is inverted except the Yaw and the throttle.
the parameters in the radio control are correctly calibrated
When I turn left, the drone decides to go right. When voice forward, the drone decides to go backward.
I would like to understand why it is changed.
I would also like to understand why the drone changes direction in mid-flight.
That’s my resume , this is a channel reverse or your mode is not 2
Try 2nd channel reverse on your radio or RC2 set reverse in mission planner
I really don’t know
I think your are rotate the yaw so drone face is reverse and your channel is also reverse as on your face , i hope you understand. If you don’t just let me know