I’ve built Flightory’s Super Stingray (Super Stingray - Flightory) and although it managed to perform a takeoff and a transition on it’s maiden flight, it crashed directly after in a sudden uncommanded nose dive and roll to the left. It was supposed to start a clockwise rising loiter.
I have been going over the logs with multiple people, trying to interpret them in an attempt to determine what has gone wrong, but we are simply not able to determine conclusively what seemed to have been the cause of the problem.
In some serious aircrash investigation efforts we have managed to salvage the wings and found that the elevons were still operational and we tested them and found them to have been wired correctly and configured correctly with the still functional flight controller.
Motors were properly fixed and tightened, no signs of loose propellors, the COG was set to 60mm behind the wing to fuselage connection to the body, as per the models manual. The battery was well mounted in the body using velcro and fully charged.
Flight controller channel details:
S1 - Motor 3(D)
S2 - Motor 2(C)
S3 - Motor1 (A)
S4 - Motor4(B)
S7 - Elevon right
S8 - Elevon left (Inverted)
S12 - Throttle
Is yours X frame? are you sure about motor numbering/letters?
What can be seen is that first of all you have a disbalance between motors 1 and 3 and motors 2 and 4 from the start (much more power is applied to these than to the other two).
If A and D are correct i.e. these are the two front motors, that means that you probably have CG way off, i.e. the distance from CG to motors A and D (1 and 3) would be about half of the distance to motors 2 and 3.
It is not the CG with respect to the wing which matters for hover, but rather CG to motor distance, and this one should be the same between the front and rear motors.
you had a motor disbalance, with much more power applied to what I assume are two front motors.
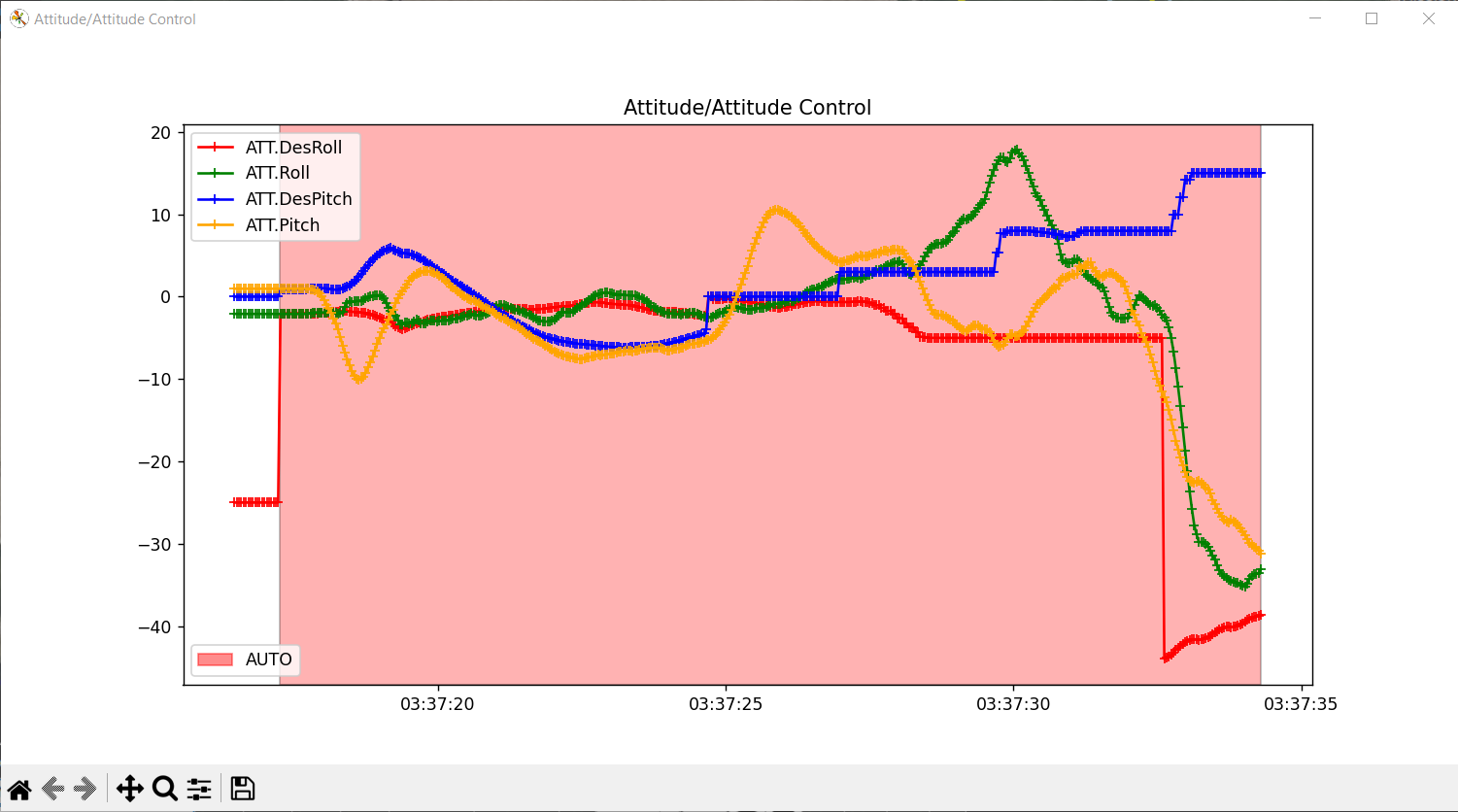
The elevons seem not to be working, i.e. they never took control of the attitude, there seems to be no response in the output to elevons when pitch and roll began to go out of bounds.
At higher speed, the motors reduced power, but because of the disbalance, the rear motors were reduced much more, and one motor was at zero, making the whole thing very unstable.
I do not understand why elevons were not operating correctly during the transitions.
The flight controller was requesting a climb, and as soon as the transition was done it started to request the steep turn to the left to start the loiter circle. While the control performance in roll is poor it seems to be following, but pitch is messed up.
I’ll suggest two theories:
1 - There was a control setup issue. I see you said the controls were working, but I’m going to assume that is with the RC manual test. Did they also function correctly when tested with FBWA? The controller is demanding full deflection for both elevons as the plane dives. So either the controls are not set up correct or theory 2.
2- The plane stalled. I’m not totally convinced myself, but I’ll throw it out there. High bank angle, low end of the speed range when the turn started (as stated by the manufacturer). Perhaps if Q_ASSIST was on that might have helped but unclear. You mentioned the C of G was correct, but was the weight higher? The specs listed seem to focus on the traditional version so do they account for the extra weight and drag of the VTOL?
A maiden flight in auto mode is pretty risky. There’s pretty good guidance on better ways to conduct a first flight that might have prepared you for better outcomes.
So you think that motor disbalance had nothing to do with it? Because what I saw in the motor output was initial drop of the power to motors, followed by two surge waves during the transition, i.e the motors were the only ones trying to keep attitude, but probably due to imbalnce were not able to (at high speed there was a lot of lift, so the motors had to reduce the power, but at lower power they did not have enough authority to stabilize, and the problem is happenning before the transition was complete. And the elevons were not operating to keep attitude…
About stall: a while ago I was testing stall behaviour of Ardupiot on a foamy plane with traditional control surfsaces, and while it is very possible that in this case there was a stall, the normal response of ardupilot would be to still put in full up elevator, which did not happen here. Also, one of the problems of ardupilot was that once in a stall, and a small yaw deviation occurred, the AP tried to correct that with rudder and ailerons, , basically leading to a perfect spin from which AP does not try to exit (kept elevator up, ailerons deflected, rudder to one side)…
Also, here the speed was ever increasing, so that is not how a stall usually goes it was a spiral dive, not a stall.
The OP states that one of the elevons is inverted. (common for this type of setup because one servo is mounted opposite the other) So seeing both elevons at full opposite PWM would mean they are both physically at the same full deflection.
ArduPlane does a great job of preventing stall, however should a plane enter a stall it will do almost exactly the wrong thing. Like you said, it will hold full elevator/pitch up because the plane does not see the stall, only the pitch down. If in a case like your foamy the AP is seeing roll it will also add aileron/rudder control and yes this if the stall fully develops it will enter a spin. I agree at that point the AP will aggravate the situation by holding in the wrong inputs.
Stall will occur at any speed. Stall is a function of angle of attack, not speed. Speed is referenced because it is the most accessible metric for most situations. Yes, the speed of the plane increased but so did bank, and control deflection. Given the proximity to the ground there was little time to recover, especially for a plane in auto mode that is trying to hold a high bank and climb angle.
While stall can occur at any speed, if you begin a dive, than usually you get less than 1 G, so the stall speed would be much much lower. I looked at the video closely, I see really a controlled nose dive with a slight spiral/roll. That precludes almost 100 % the possibility of the stall.
45 degree would give you about 20 % higher stall speed. However, what is important is the vertical, z component of acceleration which is shown on the graph.
In a turn, you indeed may have banking of 45 degrees, but if you push on the elevator, the overall g-force will be lower.
In a coordinated turn, then yes a 45 bank gives some 20 % higher stall speed.
As to the prop wash, I looked at a different video of this plane, and I see it unlikeely that the motors would cause trouble…
But the plane is commanding a higher pitch angle to climb. So if the controls are in the right direction it’s pulling (not pushing) and acelerating a stall/spin
Or
If the controls are wrong, the plane is pushing it’s way into the ground.
Could it be that the controls were inverted? And PIDs set to a very low level, so that the plane was reacting very slow? You get only 1500…1450 us of signal, very soft and low.
Normally, an inverted control will push you into the grounds in half a second, but here is takes much longer.
Yes. That’s what I’ve been meaning by saying the controls were wrong and asking about FBWA tests vs Manual tests.
PIDs are default. Most planes will fly on default pids. Very rare that something is unflyable on defaults (unlike quads) And we can see in the PWM outputs max control deflection so the control loop is maxed.
On a traditional plane yes, it would have it the dirt much faster, but in this case the fixed wing flight controls weren’t aerodynamically in effect until the vtol motors stopped.
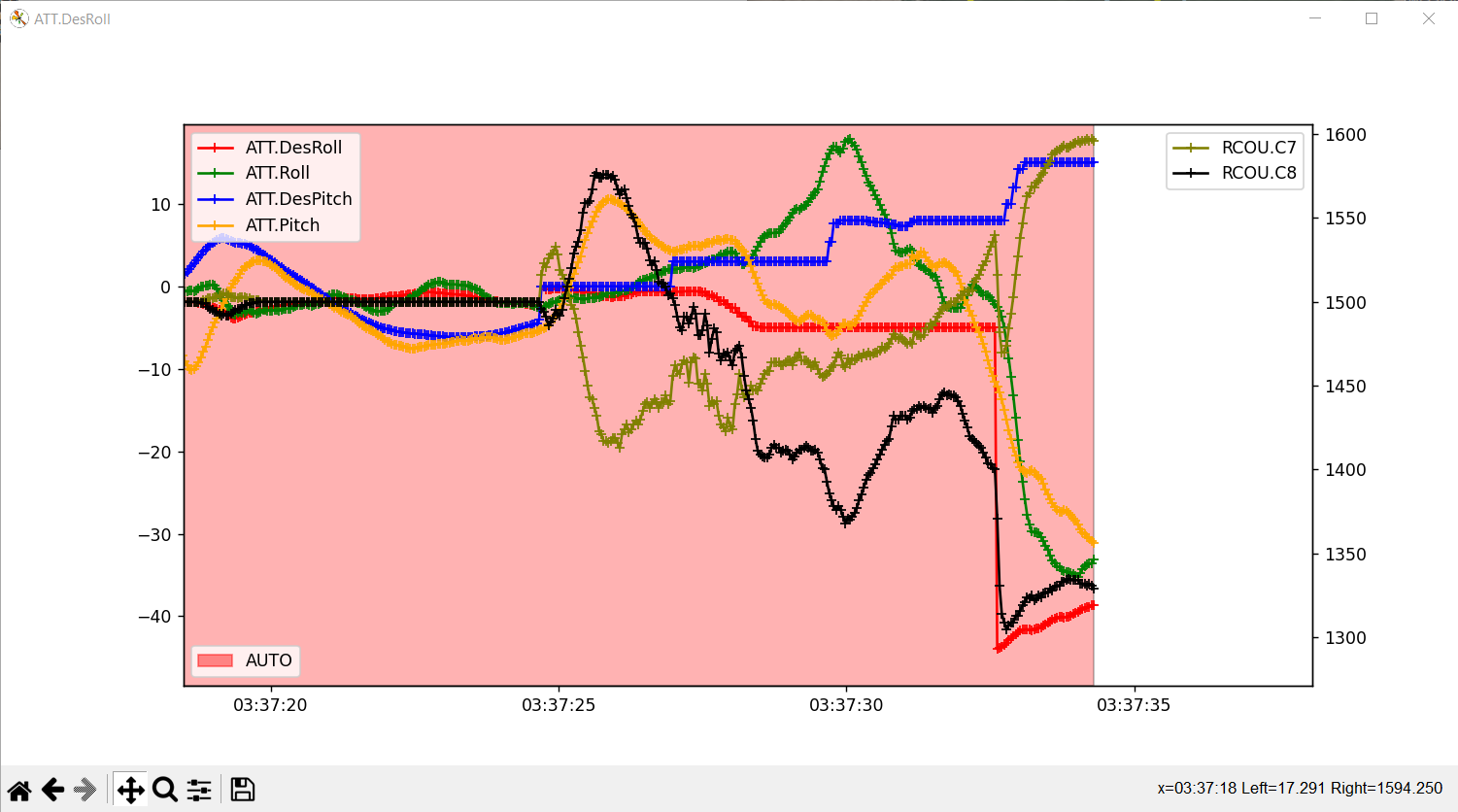
Did not get that. The PWM for eleveons is around 1500 plus minus 50, so they are not maxed, and even when things go completely sour, there is a margin of 100 uS from 1500. So I would expect much higer values for maxing out, maybe 1800 or 1200 uS.
One possible explanation is that the PIDs are low, but controls inverted.
My bad, I miss-read the scale. (was looking at the angles…) So servo 8 is near 1300 and servo 7 is only 1600. Mixing gain is 50% On elevons this means that pitch or roll can only command up to 50% of the control authority. So servo 8 (left elevon) was pushing near max and right was less so, but remember it’s doing two jobs. Still unlike to be PIDs. I’ve flown very similar wings on defaults. They may not perform perfectly, but they are still flyable.
I’ll say it outright, it is very unlikely that default pids are the cause of a plane crash. The speed and size of this plane do not suggest that it should need anything dramatic. Yes, it needs to be tuned for satisfactory performance, but unlike quads (multi rotor is a very different story), planes will fly on defaults if they are mechanically correct.