It is not the PIDs that crashed the plane, I think rather the inverted commands. But to explain why the inverted commands took so long to crash, I would say that the PIDs were low
I’m pretty sure it’s not inverted elevon control:
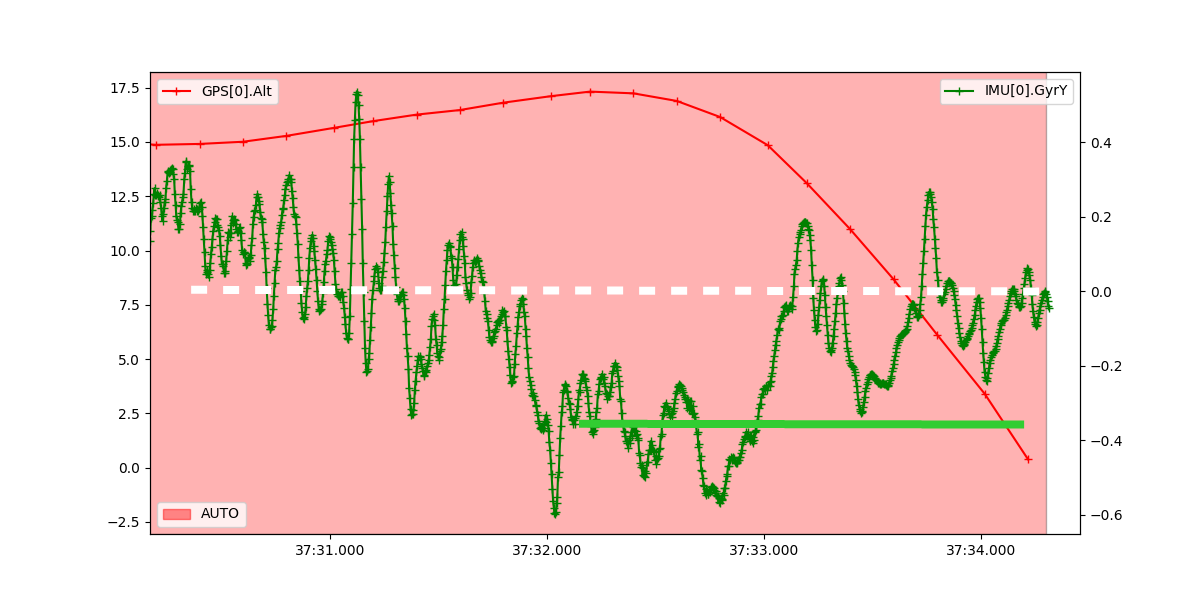
The rotational acceleration around the lateral axis (IMU[0].GyrY)returns to approximately zero after the nose goes into a dive. This rules out inverted elevator function, as the rotational acceleration would remain approximately the same (green line).
At first I also thought of a stable, but I ruled it out because of the sufficient speed. (However, you cannot be sure if the centre of gravity is completely wrong)
That depends on the aircraft. I have foamies that shoot down vertically during a stall (as well as other witch a flat spin)
Yes, not only the PIDs. The mixer functions and the servo parameters for the elevons (SERVOx_MID/MAX/MIN) are still set to the default values! I suspect, but I can’t prove it, that the elongation of the elevons was too low to deflect far enough to keep the nose up, especially in the turn that had just been initiated.
The nosedive begins when the quad motors were switched off:
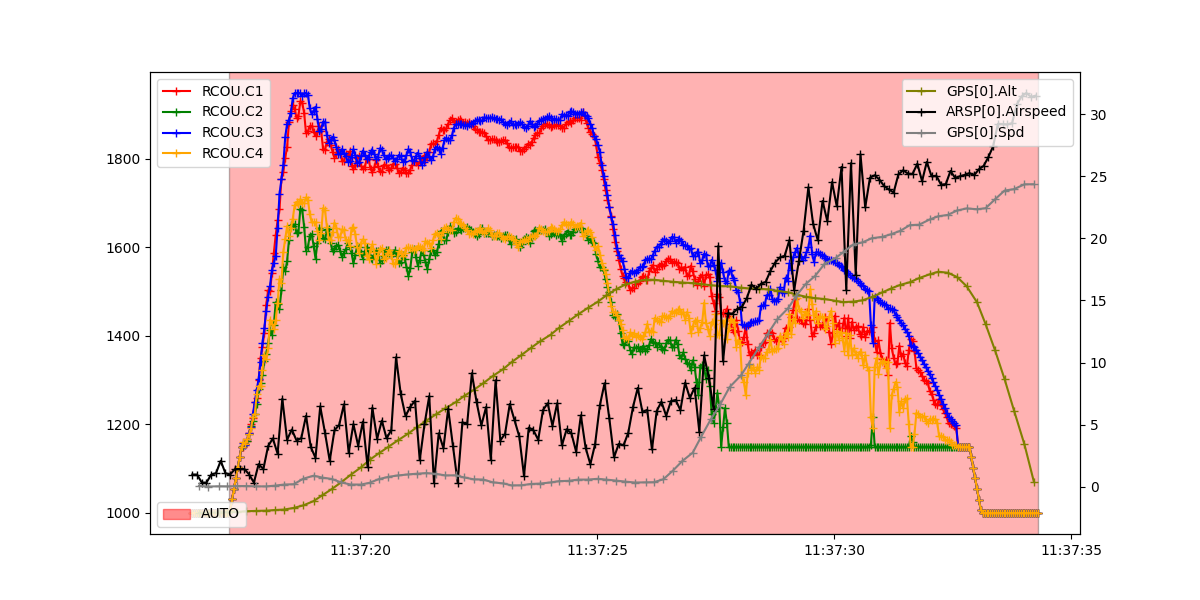
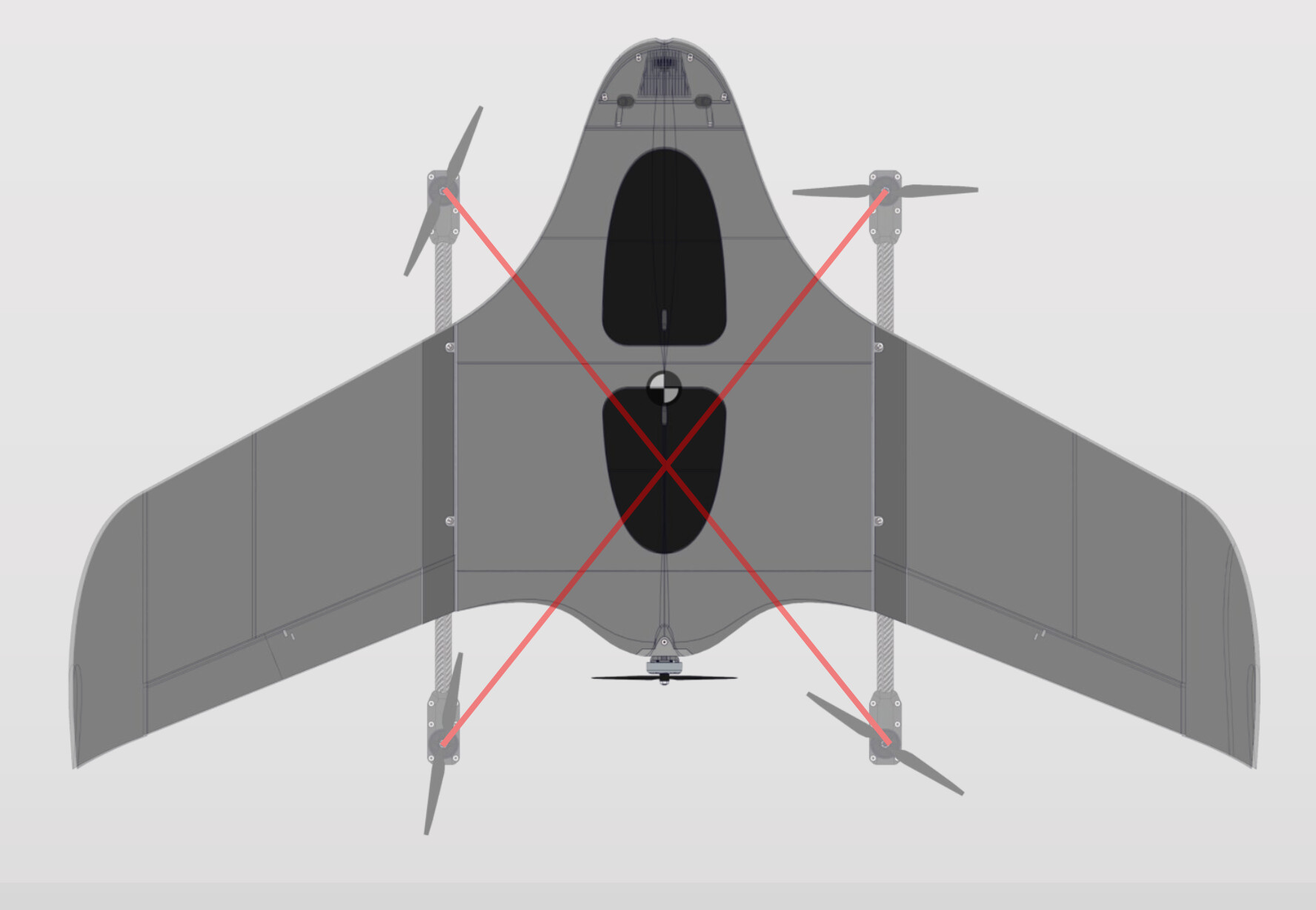
The two front motors need more power when hovering. This does not necessarily indicate a faulty centre of gravity for fixed-wing operation if the quad motors are not symmetrical around the intended centre of gravity. The manuals for the aircraft can be downloaded free of charge. I suspect it is due to the design, if you look at the position of the engines and the nominal centre of gravity:
For no apparent reason, the manual recommends switching off the Q_ASSIST functions, including the corresponding preflight warning. Q_ASSIST could possibly have prevented the crash.
The cause of the crash is most certainly the pilot who performed a first flight with VTOL in automatic mode without setting the Elevon servo parameters and mixer and with Q_ASSIST switched off. Switching to Q mode immediately would also have prevented the crash.
@Alsomitra
Welcome to the forum and thank you for posting the crash. I think it could be helpful for many people. I hope you get the plane fixed soon and do it differently next time
Rolf
1 Like
I like this suggestion. Something that I just thought about is that it is common for many wings to have positive reflex in the elevons just to maintain level flight, and with everything at default there may not have been enough bite in the controls. (default MIXING_GAIN,0.5 is likely too low)
We could also consider this plane is 3D printed. Was there a physical failure of a control surface?
I don’t think so. With a wing, I would expect rotation around the longitudinal axis. This is my experience with servo failure on an Opterra 1.7.
Rolf
I have read all your replies extensively and let me start of by thanking all of you for taking the time to go over these logs and lending me your expertise!
I am also the first to admit that the outcome of this flight is due to my own short comings as I am relatively new to this world. I will also admit that I have definitely been a bit overwhelmed with the amount of information in some regions and felt confronted with a lack thereof in others.
We have discussed amongst ourselves (the team we built this with) if we were better of flying manual on our first flight or fly a mission. We concluded that any kind of oscillations resulting from poor tuning or others would probably be better handled by the flight controller than ourselves in terms of reaction speed. I wouldn’t dare to say that manual flight would have resulted in a longer or shorter flight! ![]()
I have also considered the possibility of a stall, but considered the angle of attack combined with the airspeed not aligning with a stall.
The suggestion that this could be due to incorrect controls is a valid one and I will perform those FBWA vs manual tests on monday. We did verify control surface behaviour in response to controller inputs and to external perturbations. But it might be possible we haven’t checked those in FBWA mode.
The different locations of the COG and center of lift in quad mode is also an interesting observation and I should probably have a look at params such as Q_TRIM_PITCH.
In response to @Allister: The wings contain carbon spars and these have held up during the crash. We were also able to salvage the wings and were able to confirm that the elevons and servo’s were in absolute working order. No loose linkages or hinges, no loose wires, functional servos and so on. So luckily I can rule out mechanical/physical issues to the flight control surfaces.
I will go over everything you’ve mentioned. I am planning to have the next model ready in the upcoming week. I might prior to this models maiden flight consult you experts for suggestions on additional preflight checks I can do to guarantee a different outcome this time!
Once again thanks a ton!
1 Like
See the section here titled Check Servo Movements>Before Every Flight:
Starting up and Calibrating Plane