Hello All. I am struggling with an issue of intermittent roll axis shaking. I am using a Pixhawk 6C mini. I have mounted it on two separate heli frames and the problem is the same. I can take off and the heli will be fine for a short time, then start shaking like crazy until I land, wait, and lift off again. But soon the shaking comes back. First I thought the problem was because the first heli I mounted the Pixhawk on is old, and does have a vibration I have not been able to find. But this Friday/Saturday I mounted the Pixhawk to my CG109 airframe that I know is smooth running. Sadly the shaking came along also. So obviously the issue is with the Pixhawk and my settings.
I feel it’s a PID tuning problem, but tuning PID is not my strong point. I am hoping someone can watch the video and help me to pin point where I need to adjust. You can see the shaking at ~40 seconds and 1 min 50 secs.
@bnsgeyer , I figured someone would ask for that, but at that time I posted I could not remember how to do it. I have now attached the flight log file. Thank you for your help.
Hopefully I did the Google drive share correctly and you all don’t have access to my bank account, Lol.. Man I feel old not knowing how to do this type of stuff. Ha-ha..
Hi Steve,
It doesn’t even look like this aircraft was even tuned. All of the PID settings are at the default values. So it appears that this aircraft has an oscillation due to a feedback instability for the ATC_RAT_RLL_D term being too high. I would make this parameter 0.0001.
Please take the time to tune your heli’s properly.
That is very odd. I have flown this controller on two different helicopters now. I thought I picked the latest log file, but maybe it was one from when I was setting it up on the bench. I will look and see if I can figure out which log file is from the last flight, or clear the logs and just do another flight.
I really like the Ardupilot software, but holy crap it’s a steep learning curve, or it is for me at least.
I have another heli using the exact same components and the only adjustments I had to make was the pitch/roll offset from the heli not being perfectly level when sitting on it’s skids. That was it and it flies great. I was hoping this heli would be the same ease of setup. Guess not so lucky.
Are there any good videos on setting the PID parameters that you know of? Thank you.
I was able to get one quick flight in today after clearing the data log so I know this file has real flight data. I do very much want to learn how to do all this data analysis, but to me the curve is steep so I need help understanding what to look at to determine why after flying for a minute or so the controller then goes crazy and the shaking begins.
@Yuri_Rage , I will do as you say and follow the first flights section, however, when I built my first heli I think the version of MP I have, and the document did not always line up. This makes it hard to follow along. But I will give it a try again tomorrow. Thank you.
Set the ATC_RAT_RLL_D gain to 0.0001. Fly a test flight to ensure that gets rid of the oscillation. I’m pretty sure that the D gain is the cause. Then start following the guide
I hate to show my ignorance, but I do not know which parameters to view to determine this as instructed in the hover trim section, “noting the roll angle and pitch angle that you had to hold with the stick to keep the helicopter from drifting.”?
@bnsgeyer, I forgot to thank you for telling me to set the ATC_RAT_RLL_D gain to 0.0001. I did that and the roll shaking problem is gone and has not returned. At least not for the last three test flights, and my gut tells me it will not return. So thank you for your help.
So my next issue is still understanding which parameters to look at to find the pitch/roll value while holding the heli in a hover. Hopefully someone will straighten me out with that so I can move one to the other tuning steps.
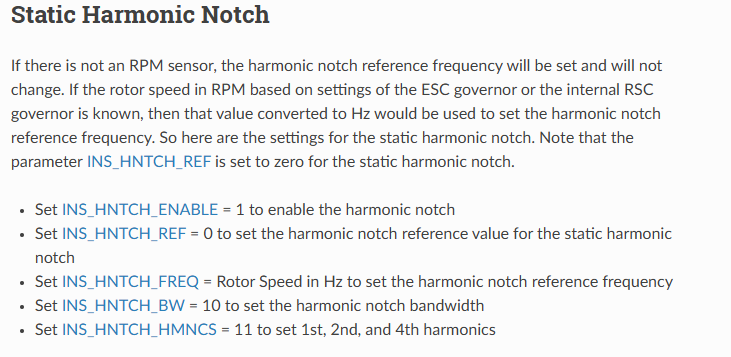
@Yuri_Rage, so I am trying to follow the documentation as you said, and when I get to the next section of notch filter setting I do not have the parameters that are listed in this section.
Steve,
yes, you would use the roll and pitch signals from the ATT message. Looks like Yuri already commented on the Notch filter. Let us know if you have other questions.
Bill
@Yuri_Rage, oh man I feel dumb now. I thought I had written the params, but I obviously did not because now I got a message about the new params being loaded. Thank you for your help, and not laughing at me, Lol.
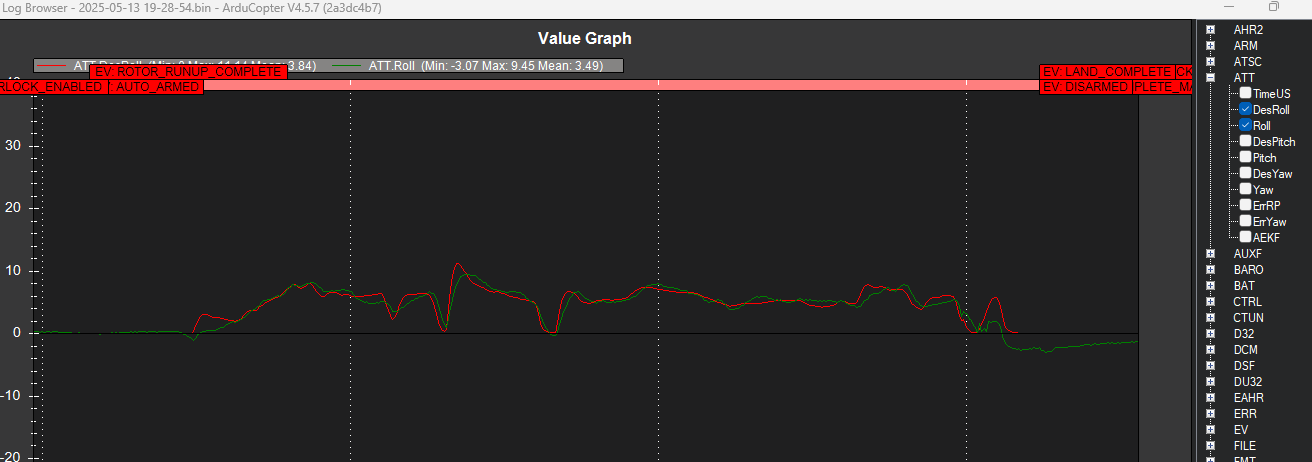
@bnsgeyer Hi Bill. So looking at the ATT graph I posted, what would you say is the angle amount I should use to set the ATC_HOVR_ROL_TRM param? To me the red/green lines are too close to see a real difference.
It is not about the difference between the desired and actual roll angles. It is the steady roll angle that you are trying to judge. based on that plot, I would say the ATC_HOVR_ROL_TRIM should be set to 500. if your heli drift in the pitch axis then you will need to set the AHRS_TRIM_Y as I describe in the wiki.
@bnsgeyer, oh I see. I completely misunderstood how to do that. I set ATC_HOVR_ROL_TRIM to 400 based on what I saw while hovering and did a test flight. It was much better. I think I will try splitting the difference and set it at 450 and test again. I will eventually get this tuning figured out, and then stop asking so many questions.
Thank you Bill and Yuri for your patience, and for the work you guys do with Ardupilot. I love how well it works for me, and I have barely scratched the surface of what it can do.