What build options did you choose for the firmware? And why a Beta version?
Why disable one of the IMUs?
You would be better off using the current Stable version firmware, maybe remove a few options in the custom firmware builder in case you need to add a couple of features.
I do see what you mean about the breaks in data.
- In the web UAV log viewer you see those gaps.
- In MissionPlanner there is a straight line drawn from one point to the next, so it looks as if there is no missing data until you look closely.
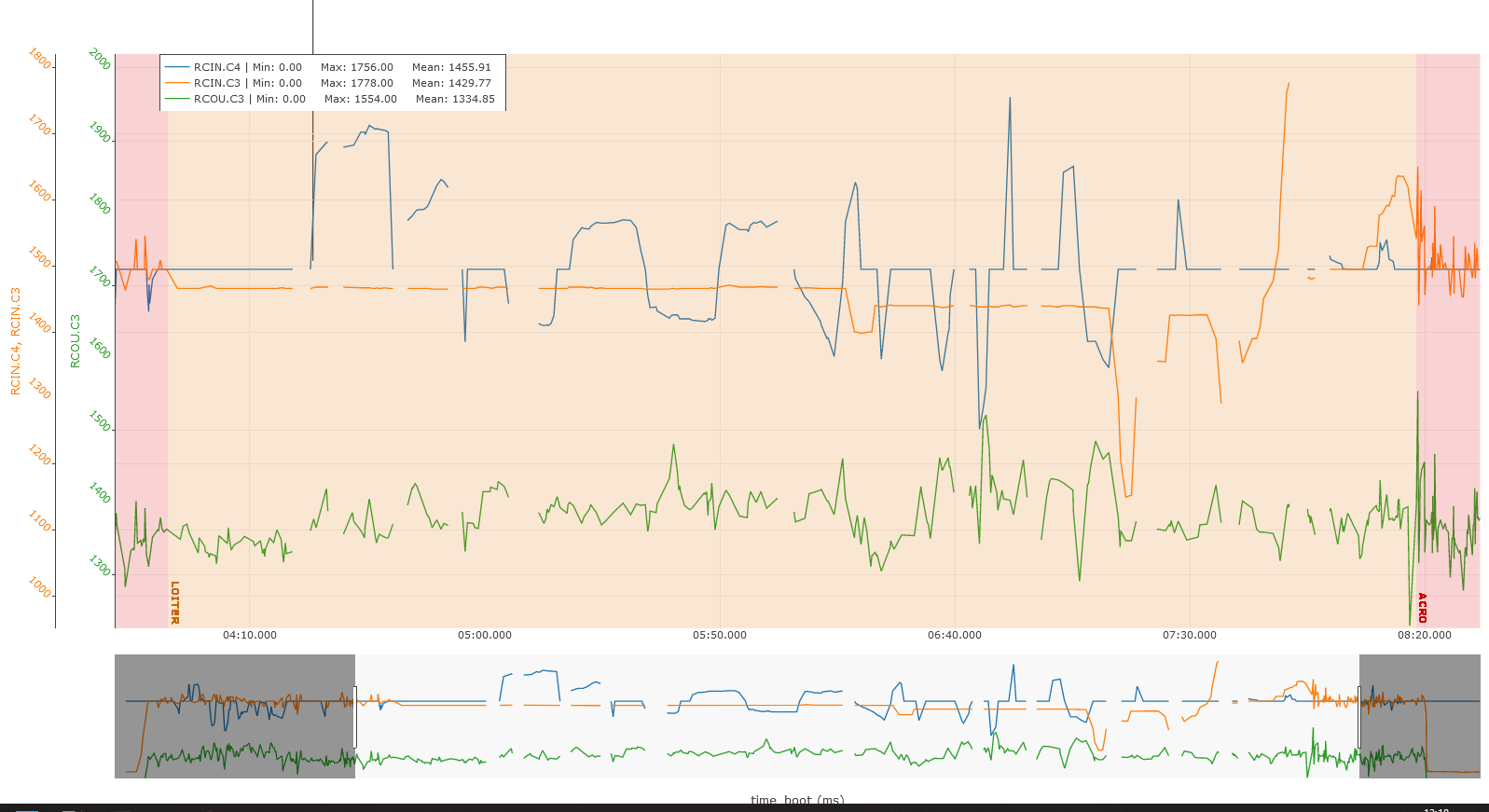
This would be a part of the log where web UAV log viewer would show missing data
and there are similar “straight lines” in the corresponding RCin and Vibration section too.
I couldnt see any missing data in many other important categories, so only some things are affected.
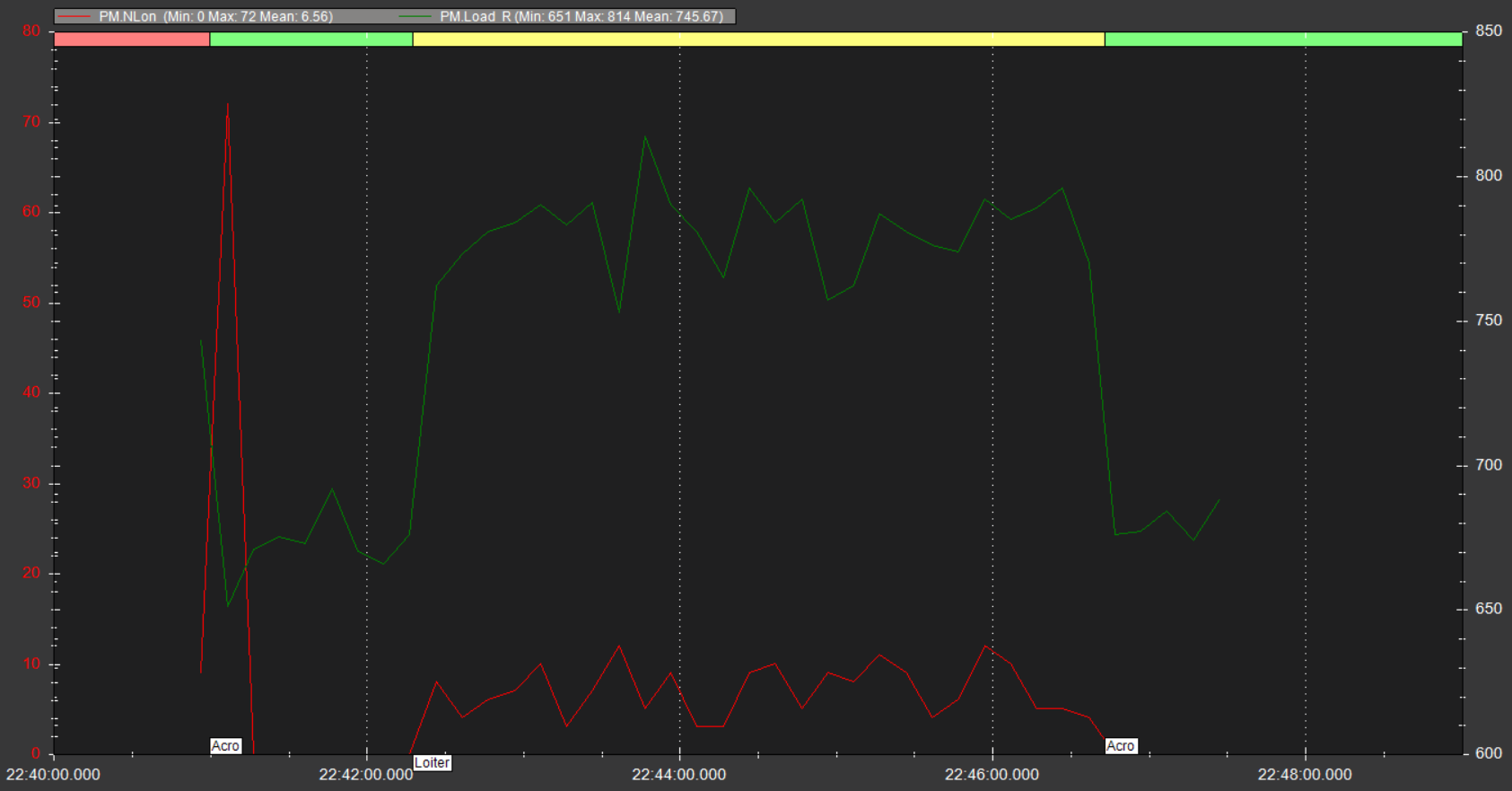
You have long loops and relatively high load especially during Loiter.
I didnt see a compass detected or calibrated, that’s going to make things tricky.
For the GPS glitches and similar, I think you’ll still be better off with:
GPS_GNSS_MODE,65
EDIT I see GPS is showing a large amount of interference in your area - you will struggle.
I find Beidou gives me a poor position despite a large number of sats, and Galileo is GREAT if you have a very new GNSS unit (maybe with the extra bands too) - so I stick with GPS and GLONASS unless there’s a special reason not to.
You can see on the map that GPS path and IMU-calculated path sometimes deviate a lot. - that gives you the Glitch messages.

I would set the battery failsafe actions:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
And this didnt make much sense, I’d expect it to be 3 at least.
INS_HNTCH_HMNCS,2