I recently upgraded to Copter 4.0.3 on our Cube Black autopilots and set the parameters according:
BRD_TYPE == 3
EK2_ENABLE == 1
EK2_IMU_MASK == 7
EK3_ENABLE == 1
AHRS_EKF_TYPE == 2
INS_USE == 1
INS_USE2 == 1
INS_USE3 == 1
as recommended over on Cubepilots. (I haven’t switched AHRS_EKF_TYPE == 3 due to lack of time for testing / gaining experience, but hope to soon)
I have started to get these warnings:
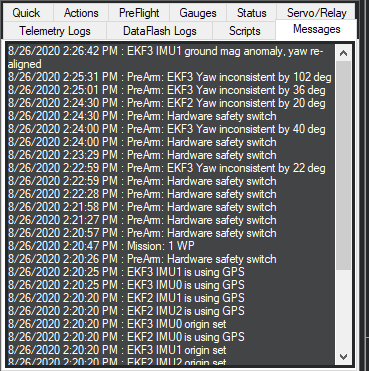
Not shown in the screen shot is are messages where the EKF3 starts switching compasses. I only have the mag on the here2 as well as compass2 enabled.
What’s weird is that if I power cycle the autopilot, it’ll be just fine for a flight or so but then come back and power cycling will clear it.
Here is a log where it appeared.
Here is the following flight where it was not present. The flights happened one right after the other and no changes to the vehicle other than a battery swap.
Any ideas what’s going on?