I’ve just received the Cheerson CX-OF sensor and I’m planning to write a serial driver for it shortly. I don’t see any information on what input voltage the sensor expects… I guess 5V will be OK?
I’ve started working on a driver and you can see the code so far here. The driver runs without crashing but it’s definitely not correct (yet) but I thought I’d get the skeleton out there in case anyone wants to pitch in on it’s development.
So the way it should work is roughly:
connect the device to one of the serial port on the fligth controller
set the appropriate SERIALx_PROTOCOL = 18 (for “optical flow”)
set FLOW_ENABLE = 1
By the way, I see from @anbello’s code above that the packets are:
@rmackay9 great start Randy, mine is held by postal strike (Ohh Canada…).
I presume this new driver will be processed like the PX4FLOW within the EKF and that we can compensate for the delay using the existing @Param: FLOW_DELAY
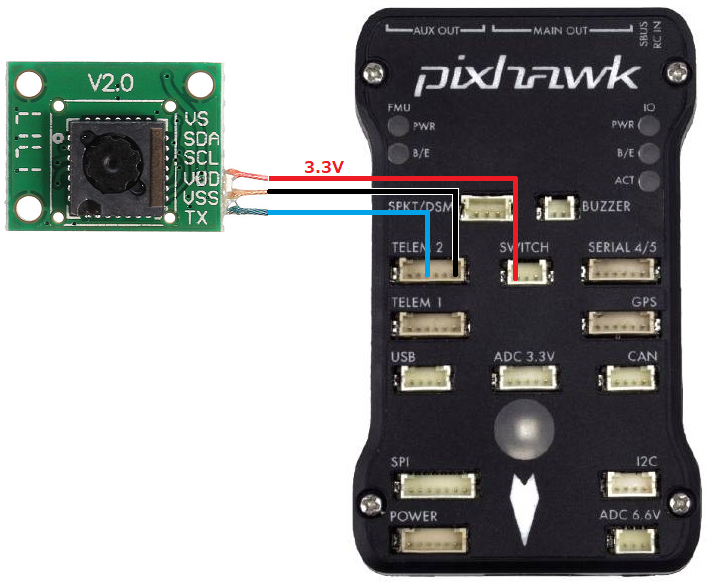
Thanks for the help! Here’s a potential wiring diagram for a Pixhawk1. I haven’t got one for the pixracer yet. Obviously using the switch’s VCC pin is a bit suspect but for now this will work because I don’t have a 3.3V regulator handy.
The driver seems to be working now and I’ve raised a PR to add it to master. Other developers will review it now which may lead to some changes.
If anyone wants to give it a try I’ve put a binary for a Pixhawk-family of boards here. This is based on latest master (i.e. Copter-3.7.0-dev) so definitely use at your own risk although it is probably fine and I hope to give it a test fly in the next few days.
I haven’t tested it’s maximum altitude yet but I will soon and report back. I hope it works to about 40m which would make it the same as the older, larger and more expensive px4 sensor… but let’s see!
I did an altitude just now and it was holding position up to 40m and then I ran out of time because the battery failsafe triggered. I’ll repeat the test (probably tomorrow) but this time I’ll use Auto mode to make sure it’s done a bit more efficiently.
I felt 40m was about it’s limit but let’s see.
By the way, I found two issues today:
if both GPS and optical flow are used, if the vehicle completely loses GPS then the EKF failsafe triggers even though the EKF can maintain a position estimate with just the optical flow (issue here).
the lightware lw20 reports 655.35m when it gets a bad reading. This is similar to the issue we fixed with the Benewake lidar recently so I know what to do. (issue here)
Hi, i am also facing the same issues. After i uploaded the custom firmware successfully, the pixracer cannot be connected to the mission planner although it has a com port. May i have some advice on this.
@Darren_Goh
If the firmware I linked above was loaded to the Pixracer it wouldn’t work because the firmware was means for the regular Pixhawk boards. I may include the CX-OF driver in Copter-3.6.4 which will probably start beta testing later this week. Failing that It’s possible to load “latest” from the mission planner’s firmware install screen after pressing Ctrl-Q. “latest” hasn’t gone through beta testing though so it’s possible that it has bugs.
@rmackay9 I tested CX-OF with my 280mm, 6inch props, quadcopter with Pixracer, it seems to work but I see some strangeness. Even if I have data relative to OF on dataflash log I see all 0 on Status and MAVLink Inspector (APM Planner 2); in Inspector OF data are not refreshed (0.0Hz); on Messages I see always:
[MAV 001:1] EKF2 IMU0 has stopped aiding
[MAV 001:1] EKF2 IMU0 is using optical flow
In a little indoor test flight in FLOWHOLD the quadcopter is quite stable with little jump in altitude, in ALTHLOD I don’t have those little jump.
@rmackay9 sorry if I repeat myself but I would like to know if is normal that I see all 0 on Status and Mavlink Inspector on GCS and the messages
[MAV 001:1] EKF2 IMU0 has stopped aiding
[MAV 001:1] EKF2 IMU0 is using optical flow
continuously repeating.
The same for the jumps in altitude in FLOWHOLD visible in dataflash log attached above, are they normal?
If I set FLOW_ENABLE = 0 and fly in ALTHOLD I don’t see those jumps. Do the optical flow in some way influence the altitude estimation?