Trying to complete a T1 VTOL build, I’ve been stuck for a while now at setting up the tilt servos correctly. They won’t go all the way to the limits set when switching between FWBA and QSTABILIZE. For example, I have:
But I can see in the Servo Outputs in MP that the max output in QSTABILIZE is only at about 2002.
When I set the same servo to elevon for a test, and then reverse the servo in Servo Outputs, I see it moving all the way to 2200, so there is no mechanical blockade or anything.
@andyp1per thinks this might be a bug and suggested inviting @iampete to this topic.
Version is AP 4.5.5 stable. There might be one other report of the same issue over at RCG, seems like the issue vanished for that user by changing totally unrelated (RC channel) parameters. I even tried that but it didn’t work for me.
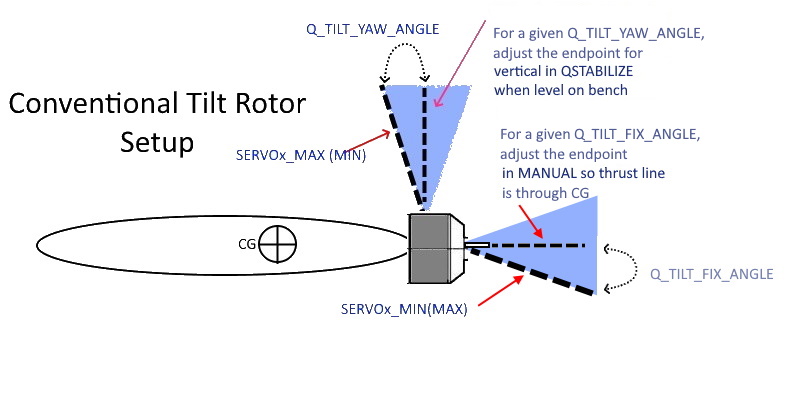
I don’t understand the problem, maybe you can explain in more detail. The servos will not go to the limits in VTOL because the need some headroom for yawing.
Ok, of course it was a user error. While looking at the image again and checking those parameters, I discovered that for some reason I had already set Q_TILT_FIX_ANGLE (to 15). I had actually planned to set both angles after the servo moves fully when switching modes, but I’ve been at this build for 5 or 6 weeks, it must have happened at some point…
Here’s a clip I did before discovering the cause: Unique Download Link | WeTransfer and one question: With these nacelles, it’s physically impossible for the prop to strike the wing or for the motor to face downwards, so I have now set
Q_TILT_YAW_ANGLE,30
Q_TILT_FIX_ANGLE,0
with the servo settings above - does that look correct?
I’m a bit worried about having the first value at maximum, but actually a few more degrees would make the motor even more flat. Or I am doing something wrong again.