I have detected a repeated failure. After a few minutes of flight in Auto mode, there is always a loss of height that corrects itself, even touching the ground. You can see in the graph three lost of height before the big fall to ground. Then I selected RTL to abort mission, but afert climb, it falled too fast and it crashed.
You are also missing useful log entries such as IMU, VIBES and MotorOut to name a few.
Is this a tethered drone?
Your voltage is odd at 60V or is it just an uncalibrated voltage sensor?
Without the motor data I can only guess but it looks a bit like a hardware failure.
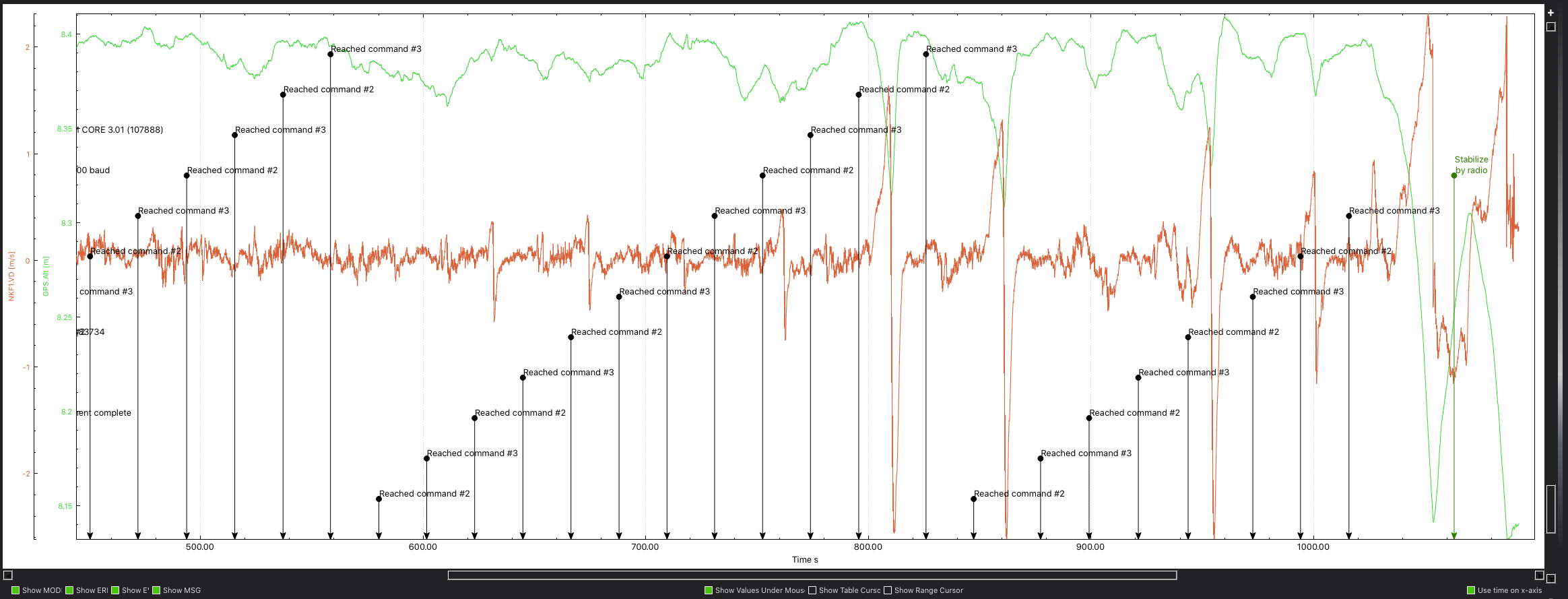
My reasoning is that looking at the VD, dPD - Velocity and Position Derivative Down (m/s)
there appears to be downward ‘glitch’ before the obvious height loss.
Have a look starting at 632seconds and again at 674seconds.
Yes, it was auto-tunned, but before last fw update. And no, it is not a tethered drone.
About voltaje, now it is uncalibratet. It was with previous fw, it’s curious.
Anyway this issue also happened before update.
I don’t think it is a motor problem because when it was falling, it did stable and with constant speed. I’ll check motors.