Hello to the good community members,
I have assembled a quadcopter called ‘T-motor M1000’
While there are several issues still to tackle, there some of the problems that I want to highlight and want to invite you all to please suggest the changes.
Weather: Mild wind of around 2-3 m/s, clear sky, playground
-
Please note, the copter did perform very well in POS HOLD mode (extremely beautiful I must say, as I had been struggling since long to get anything near to it). The only problem is it looses altitude by 2-3 m when I give roll/pitch of over 5m/s, the sensor reading remains constant as if its holding it but in reality it drops a lot and its scary sometimes.
-
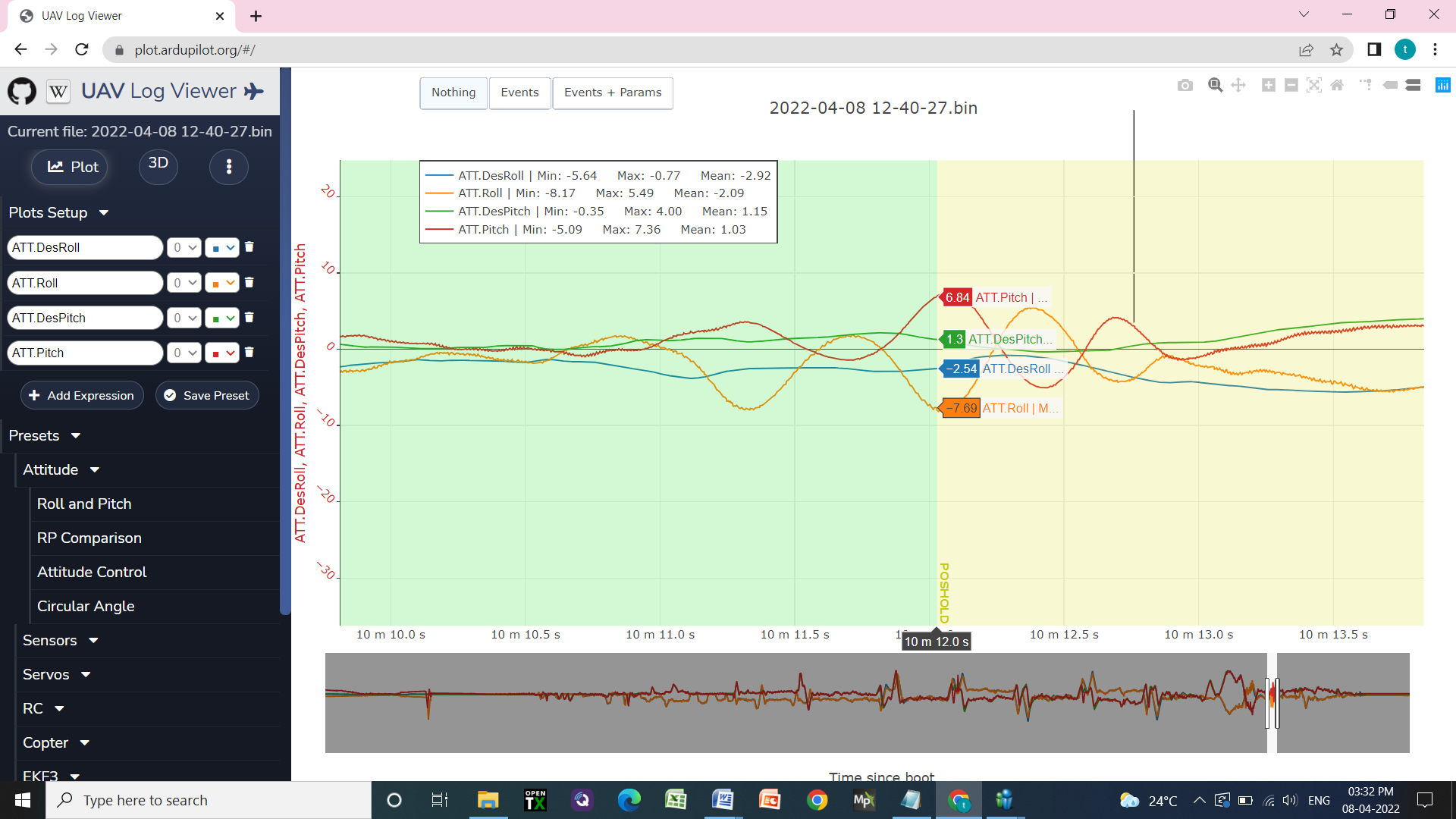
During RTL when the drone was coming to home I have observed a lot of instability in Attitude control, at one point it felt like it will fall from sky. It can also be seen in the graph below
-
There is a constant oscillation (in diagonal axis), we tried to change MOT_Thst_expo to 0.4, 0.2, 0. The oscillations seems to die at lower MOT_Thst_expo but its still oscialliting although the frequency and amplitude of oscillation has reduced. Any suggestion, what other parameters we can play with to git rid of this?
-
The Loiter flight mode is not as smooth as we had expected. There is an extra breaking at the end of every pitch and roll command. How can I make it smooth
-
Is lowering MOT_thst_expo going to adversely effect my flight in AUTO mode. POS and Altitude hold mode seems to work good with Expo=0, It’s an integrated T-motor ESC and MOTOR combination. Antigravity MN 7005 with 24x7.9 prop.
-
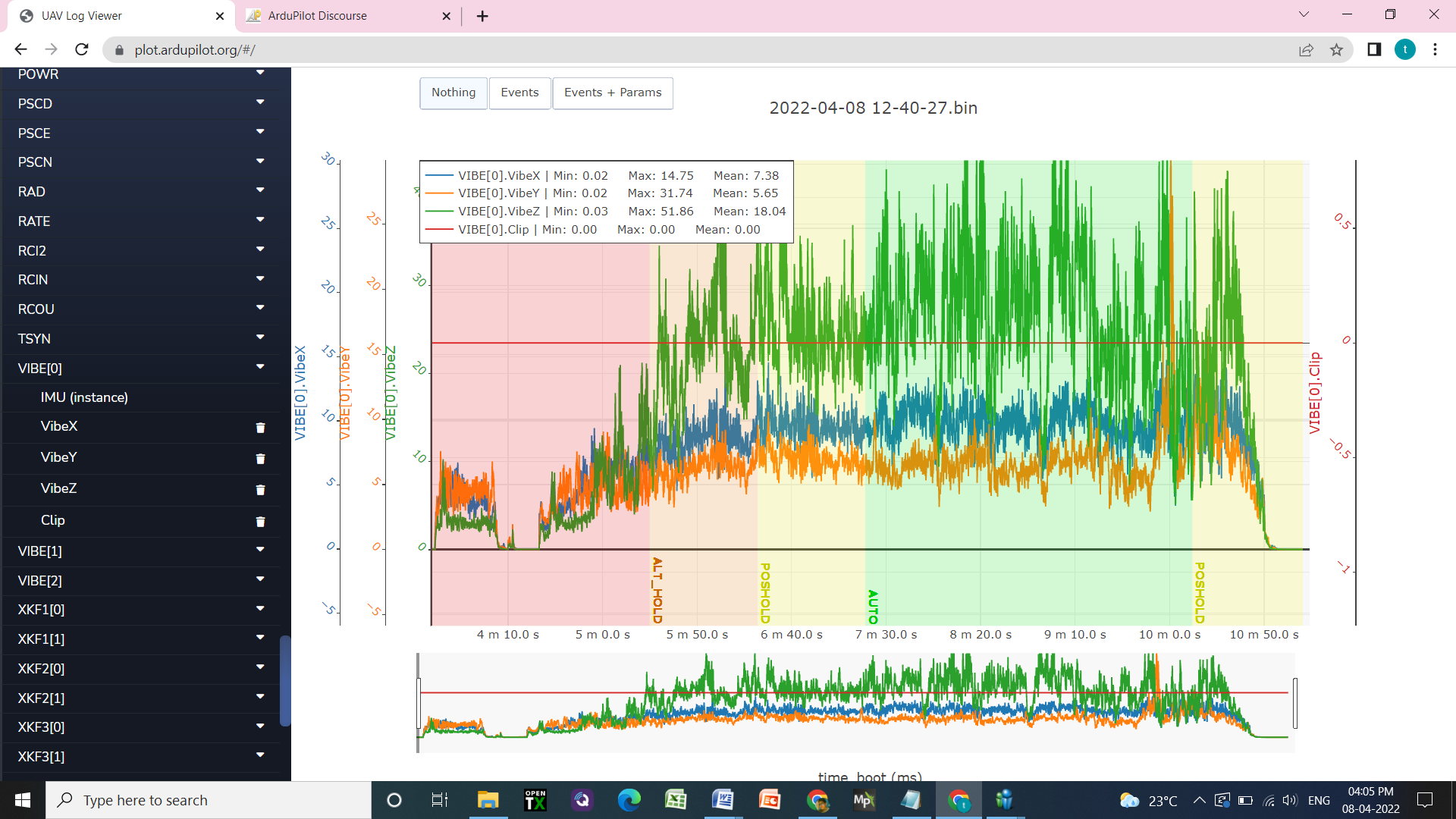
We had checked the vibes in POS HOLD and Altitude hold mode by flight at 9-10 m/s but had not crossed the barrier of 30 vibe in any axis. But today during flight we saw it shoot to 52 in z-axis, and there was also an unexpected peak in y axis (a single high peak) at 32. How can I understand this problem and which direction I should explore more in to solve this. Any hint please?
-
Please help me explore the effect of FLTE, FLTD, FLTT parameters. As per wiki these should be half of gyro filters, but I have seen people setting it something different to achieve good tune. I had also changed it but didn’t notice any significant change.

Please find the logs in the following link
https://drive.google.com/drive/folders/1QyF1TxCPH0XFpZwX5uhMh99ZYUTxeRtX?usp=sharing
Please feel free to share your comments, I want to make it a reliable system for aerial mission. Also, am eager to explore more and experiment with it.
Thanks for all the support that I am already got. Hoping for some more. As I develop understanding I am also eager to help people like me.