The Autotune results didnt get saved. Here’s what I would do:
- update to latest stable firmware - existing parameters will be preserved
- in MissionPlanner, go to Initial Parameters, put in your prop size and battery cell count, also select “suggested” then accept all changes
- set the pitch and roll values from autotune (they will be near enough for now), plus some other parameters (see below)
- do a test flight in Althold and Loiter to gather more data
ATC_ANG_PIT_P,7.6
ATC_ANG_RLL_P,7.6
ATC_INPUT_TC,0.2
ATC_RAT_PIT_D,0.0031
ATC_RAT_PIT_I,0.088
ATC_RAT_PIT_P,0.088
ATC_RAT_RLL_D,0.0031
ATC_RAT_RLL_I,0.088
ATC_RAT_RLL_P,0.088
INS_HNTCH_ENABLE,1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
Did you do the ESC calibration process after you set these?
MOT_PWM_MAX,1900
MOT_PWM_MIN,1100
If you didnt, then run the calibration process linked below BEFORE you do the motor tests listed next.
After these changes, reboot the flight controller, go to MissionPlanner Motor Test and check/set these:
MOT_SPIN_ARM
MOT_SPIN_MIN
MOT_SPIN_ARM should be as low as you can get it and all motors would still reliably start up. Add +0.03 to that value and set that new value for MOT_SPIN_MIN
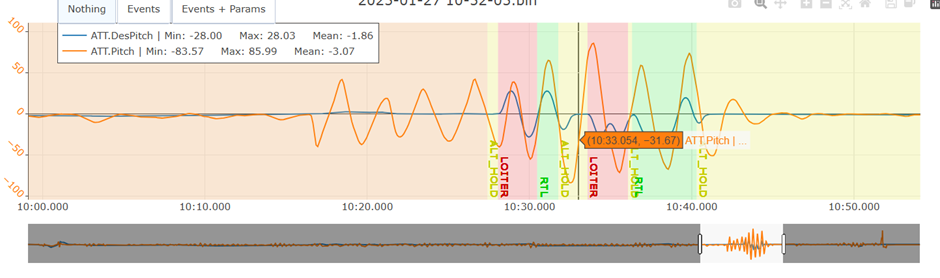
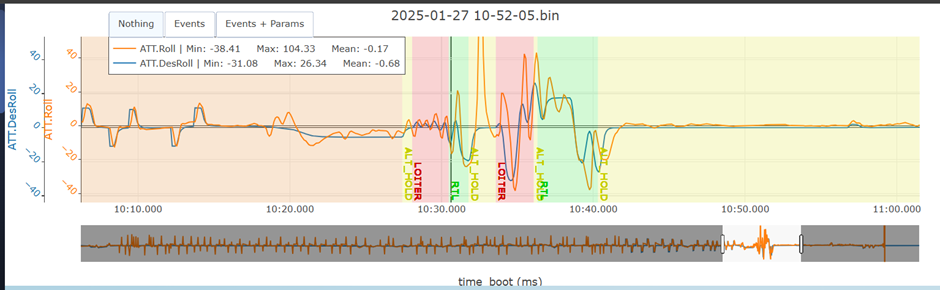
Now do a test in AltHold and Loiter - just do some gentle pitch, roll and yaw. If everything is going OK do some ascent and descent too.
Let’s see that .bin log.
Semi-automatic ESC calibration:
https://ardupilot.org/copter/docs/esc-calibration.html#semi-automatic-esc-by-esc-calibration