I’m posting this on the Arducopter category because the log analysis categories appear to be deprecated. Comments there indicate such requests should be posted to Arducopter.
Apologies if this is not the right place. Happy to be redirected. I am new to the forums.
I have a self assembled quad copter running arducopter.
All up weight ~3.5kg. Orange Cube Plus.
During testing, 3 short hover flights were done successfully - one in loiter mode and 2 in Auto mode where the take off and land instructions were given via QGC.
During the 4th flight, also in Auto mode, it became unstable, and crashed while coming in for landing. I’ve had multiple crashes with this rig, and I need a fresh pair of eyes to look at the logs and help me figure out what I’m doing wrong.
The crashes are intermittent. I can’t put my finger on what is wrong exactly.
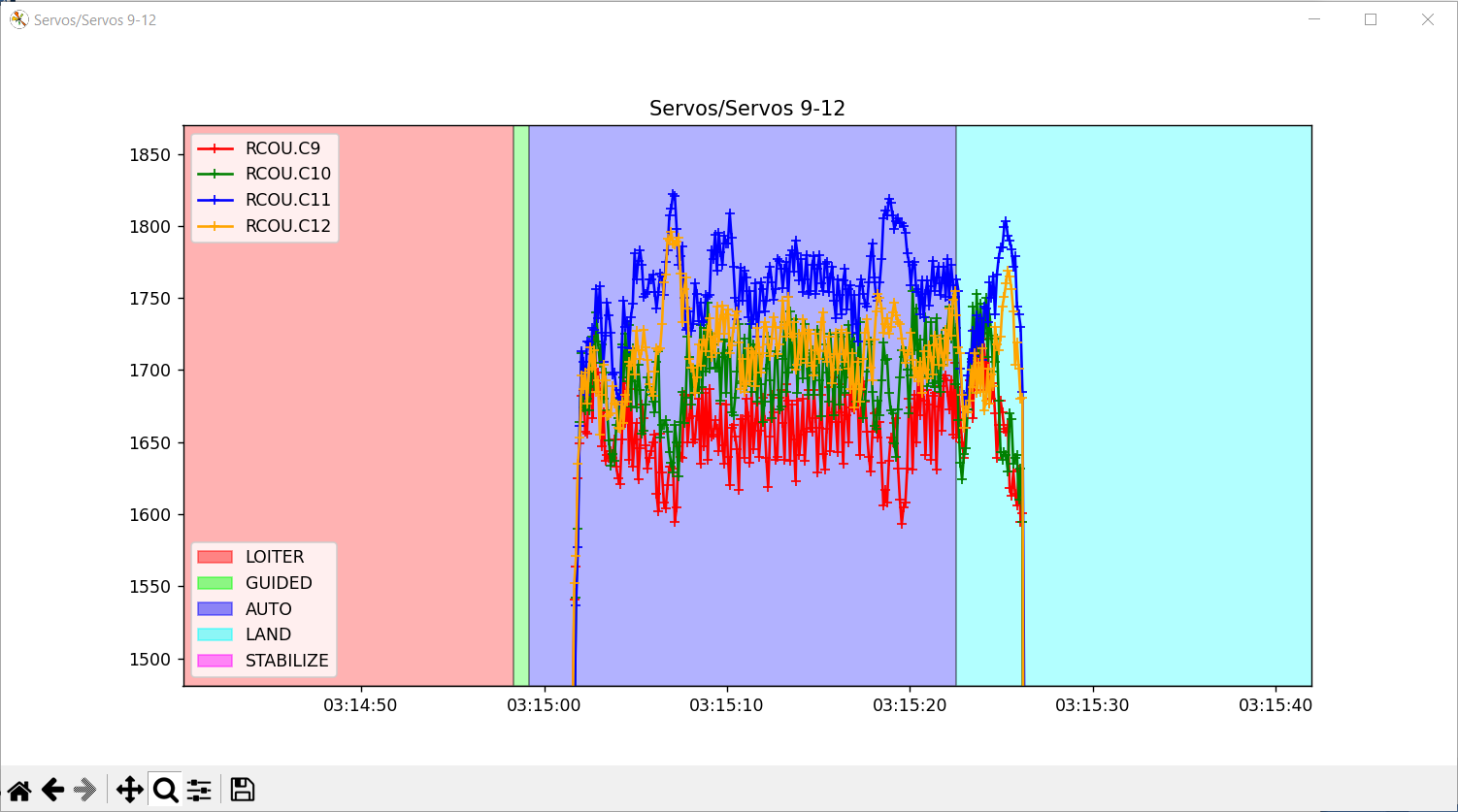
The craft is either overweight or underpowered. For a hover the motors should ideally be below 1600. If you’re hitting 1800 just hover then you’ve got very little left for control.
You have not followed the basic guidance for tuning. First flights should be done in Stabilized mode then Alt-hold mode. Use these flights to make sure the drone is mechanically sound and set the notch filters. If every thing is good then you can try loiter. By starting in loiter and Auto mode you are flying with untuned controllers with little chance for recovery.
I suggest you look for:
1- ecalc.ch to figure out if your hardware is going to be suitable. It will cost less than a propeller but may save you significantly in the long run.
2- Use the Methodic Configurator to get your configuration and tuning correct. Again, it will take some time but it will save you crashes.
Thank you @Allister for taking the time to go through the log.
Yes, it does appear overweight. I used eCalc to decide the propulsion system, but it was borderline given the weight. Looks like that was not a good decision.
Let me go through the methodic configurator and get back here when i’m better prepared.
@Allister out of curiosity, what tool did you use for the plots? It doesn’t look like the UAV log viewer or mission planner, unless I’m mistaken.
I use MavExplorer for log analysis. Using MAVExplorer for log analysis — Dev documentation It’s not as user friendly for beginners to Ardupilot, Mission Planner is better there, but with some practice it’s really powerful.
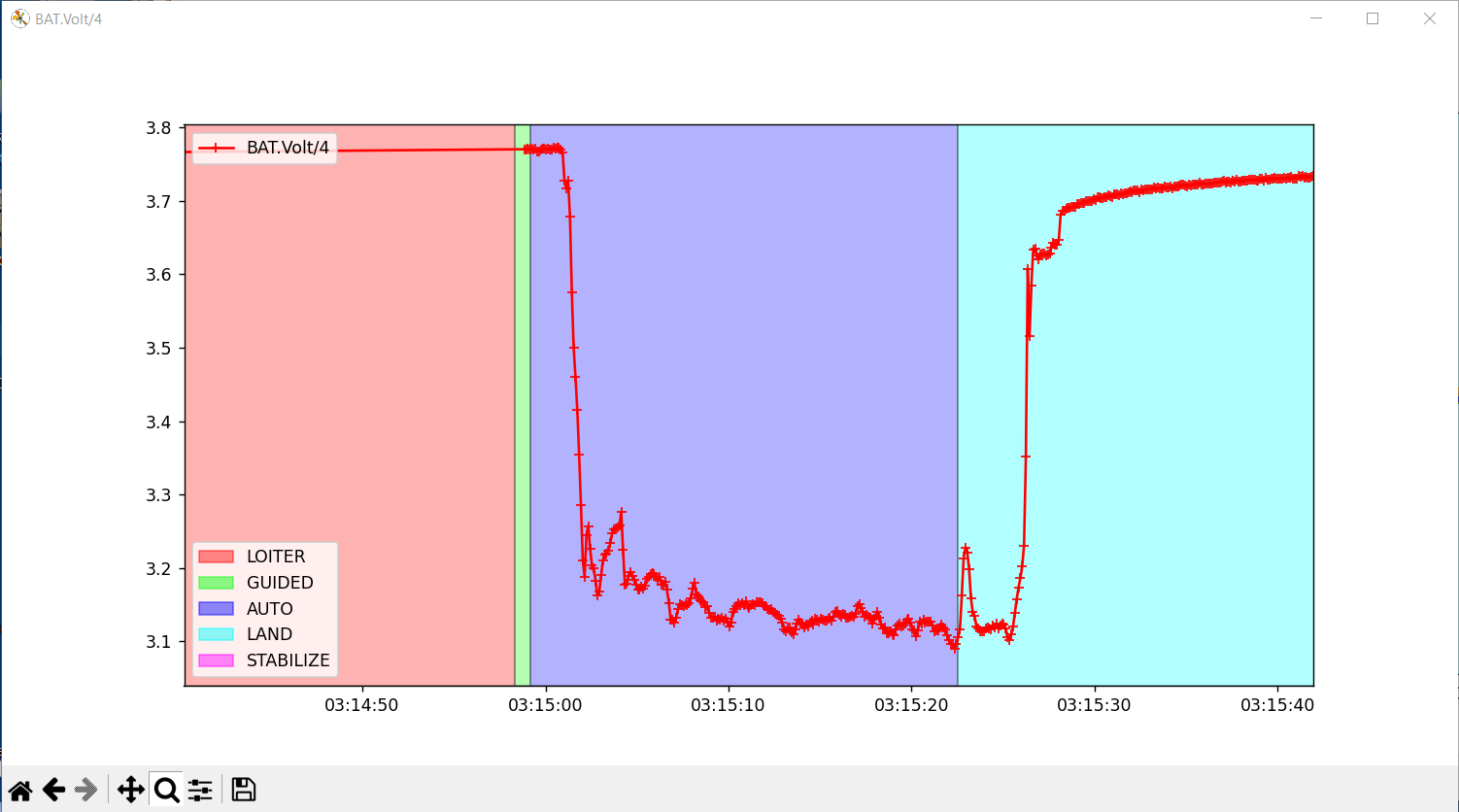
What kind of battery are you using? If that was a 4S lipo then I suspect you may have damaged it by going repeatedly to such low voltage.
Thanks @Allister. Good to know. For my level, I’m happy with UAV log viewer for now. I don’t think I’m fully utilizing its ability, given I’m learning.
Yes, it is a 4S lipo, however, I did not calibrate the voltage level before flight. I suspect it is reading a lower value than it should.
It is a new battery. The battery was fully charged before flight, and all the flights cumulatively lasted ~3 mins, which appears to be well within the battery’s capacity.
I hope it’s not damaged, but based on the data available, you make a valid point. I’ll check. Thanks.
My experience with the Cube Orange power meters is the voltage is usually pretty accurate out of the box. Maybe a minor tweak of the calibration here and there but nothing significant. (current readings can be a different story) Just be careful with that battery until you know for sure. LiPo don’t like anything sustained below 3.5v/cell. 3.2 is very hard on them.