It gives me hope that I’ll be able to get this one working well.
I was thinking of putting together a list of things I have run into on this thing. A big one was the yaw bias, which I never was able to fix. You guys aren’t mentioning it now, but I don’t know if that’s because it is not as bad now or what. I have a theory that maybe the problem wasn’t motor twist as much as arm length. It is very easy to pinch a wire between the end of the carbon fiber arm and the motor mount, lengthening it by the width of the wire. It is also very easy to do a lot of the same kinds of things at the joint end, changing that geometry as well. It is very difficult as far as I can tell to twist motors out of their intended orientation though.
There are also two versions of the EDU-450. I think the v1 frame came with 880KV motors and might have called for a 3s battery, but this one came with 920KV and calls for a 5300mah 4s battery.
BTW, I can repost old logs if it would help to be able to see them. I just didn’t want to leave them hanging around beyond their useful life. If it is better to leave them I will start scrambling GPS data and leaving them up.
At one point or another I tried using the version in the wiki which caused me lots of trouble when combined with my herculean ignorance. It would be neat to have a v2 version for 4s and the new version of the frame.
If you look at the log right before I ran autotune (18-41-17) and got the vibrations, that flight was excellent.
I don’t know if it’ll show that same link again or not. But the RATE>P graph looks much different.
Yea, this looks like a fairly normal pre-final tune log (not bad at all). Auto Tune Jacked the PID’s way too high. You may as well revert back to this.
Quick Auto Tune anecdote-I ran Auto Tune on an Edge Case sub250g quad yesterday that resulted in ATC_ACCEL_R_MAX,Infinite. It actually produced that text value which caused all kinds of havoc. I went back to the tried and true manual tune on that craft and it’s flying pretty well now.
Awesome. Had I not known anything about tuning at all, I’d have thought nothing was wrong at all with things using that configuration. I certainly wouldn’t have thought it would insert something like “infinite”. Have you run the quick tune lua script on anything yet? I assume that’s really intended to be used on much larger quads, but I was curious if it would work on this 450.
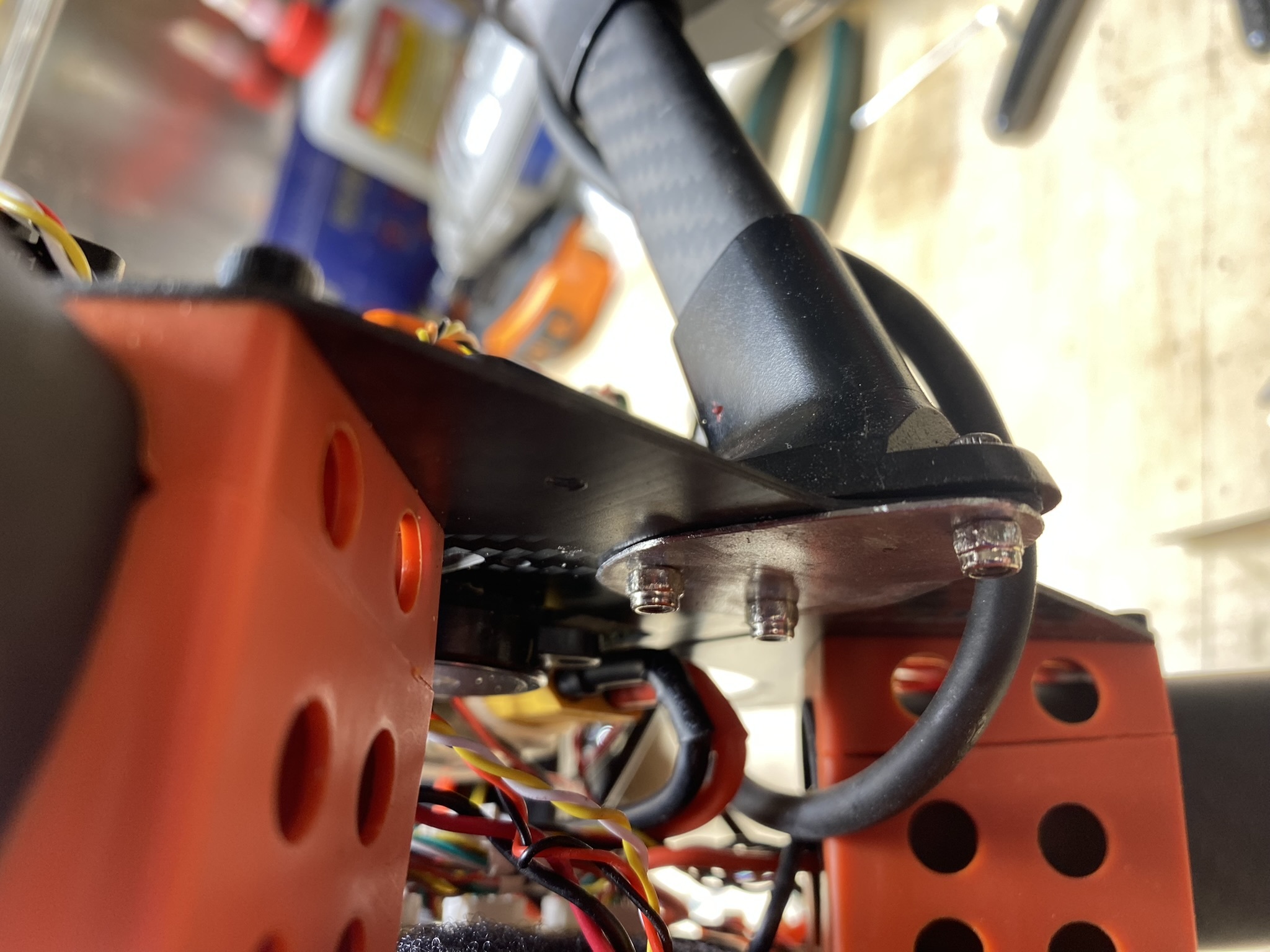
Back to this GPS mast. The way the EDU-450 top plate is made, the front screw holding the mast is out on a protrusion of the plate. It is extremely flexible in that forward/reverse direction. I am considering maybe coming up with something to sandwich on the bottom of the top plate to stiffen that mount point up. Maybe some sheet metal like you’d use to fix a car fender or something. I guess I could also 3D print something, but I have doubts about plastic like that yielding enough resistance to twisting.
@xfacta@dkemxr I did a little bit of maintenance on the wiring. I also added a sheet steel plate I cut below the GPS mast to help stiffen that part of the body.
Admittedly I question the effectiveness of this, but wanted to try it. The problem really is that protrusion out the front they stuck the end of the mast on. That really sucks. It CAN twist forward and backwards as a result. Unless I tie the top and bottom plates together though, I don’t see a great way to stop that. And then I worry about overall mass. I may try 3D printing a modified version of the joints and seeing if I can tie it together without adding 100 grams or more to the build. Anyway, this is a first try to stabilize it some.
I took a flight this morning and I think it isn’t better than the first cut from Shawn yesterday afternoon before autotune. Nevertheless, where do you see things at this point? I think the before and after notch filter graphs are interesting. Also, the RCOUT’s are more distinct - which has some implications about that yaw difference. I made a tool to measure the arm lengths from the CAD published by Hexsoon. If things look bad there now I am going to try that out. I have my doubts about its effectiveness too, but I think a lot of this is splitting hairs - and then splitting them again and again. And if you split it too much, it flies crappy. IOW, I think the right tune is very close to all the bad tunes - so maybe just a little bit of difference would be enough to make the difference.
Other than the minimum Yaw bias this looks OK to me. I would make a flight with some aggressive Pitch/Roll inputs if you want to continue with manual tuning. Personally I would not bother with Auto Tune at this point unless you are more interested about why it’s not producing a good tune than you are about having fun flying the craft
If you do want to further the manual tune read the Wiki section about Transmitter Based Tuning and configure a Chan 6 pot on your Transmitter in prep for it. It can be quite time consuming but I enjoy the process if I set side enough time to complete it.
And no I have not tried the Quick Tune Lua for Copter. It might be worth a try on this little quad just to see what happens. It’s almost indestructible being so light.
I don’t care at all about auto tune. I might play around with it out of morbid curiosity, but now I have a good place to fall back to when things don’t go well. Same thing with quick tune.
I had read some about the transmitter based tuning, but it seemed like magic at the time. I will take another read through it.
Thanks very much for all the help. I need to figure out my gimbal stuff now… It might turn out to be a nice day for figuring out how to control that with the cube.
It was on there, but it wasn’t hooked up to the flight controller. It was doing its own stabilizing and whatever, but it wasn’t being controlled. I had reasoned having it mounted would be good as far as the overall weight and whatnot. Would it have been better to have removed it?
Ah, you don’t want that it needs to be locked in position if it’s on there. The mass is a good idea to have present but it can’t be stabilizing. That will throw Auto Tune off almost certainly. In some cases it might be better to just remove it for Auto Tune. My friends big X8 with a high $$ gimbal and camera could never get a good Auto Tune with it on there. We ended up working thru a manual tune using WhatsApp as he was on the other side of the world.
I don’t want to tempt fate too much, but that tool I made to gauge arm length showed me that one of my CCW arms was a good 1/8" (maybe more) longer than the others. It looks wrong, but it measures correctly now. Force x Distance would have been all wrong on that motor compared to the others.
I got squirrely and tried auto tune again. I had removed the gimbal completely, btw. Same result. Both roll and pitch finished pretty quickly compared to other runs, and it seemed fine until a few moments into the flight after it was finished. Then the same exact vibrating oscillation came back. So I am rolling back and kinda calling it over for autotune at least for now.
I might still try the quicktune lua script. But I kinda want to move on for now I think.
Go back to that last known-good set of params - we’ve seen plenty of people call their copter well tuned when it was way worse than that.
That yaw bias is distinct in the motor outputs - it’s not a killer and the effects will only show up with aggressive manoeuvres so you can leave it if you want. If the motors look to be all mounted equally, then it may be props that are slightly different - that has happened before.
You could set INS_HNTCH_OPTS,2
to get a notch filter per motor to cover those double peaks you get from the motors running at different RPM ranges.
Set LOG_BITMASK,180222
for subsequent flights and we can sort out some minor PID adjustments. Get out there and do what you want to do, see how it goes and we can work with whatever logs you feel like providing
For your information, there’s currently nothing in parameters that you need to unset or change for continued use. The flight controller is not being stressed and the log file sizes are OK.
The quicktune script only sets a couple of basic things so the copter is flyable, I believe you are already well past that point and that script likely wouldnt help.
Thanks. I typically do not do anything even close to aggressive. That said, it seems so stable now, I am far less anxious about it doing what I want it to do. I’m sorta okay with driving grandad’s caddy, so to speak. TBH, I’m pretty dang happy with it at the moment. I will definitely turn up the second notch, but someday I do hope to better tune the frame to get rid of that bias. I just don’t have the energy for it at the moment, really. I am enjoying just flying it for now.
I plan to take it out to the farm tomorrow and run some missions to see how the camera controls work out.
I will definitely come back with some logs outside my tiny back yard. I can’t thank you guys enough for the help so far. I know I’ve tested patience with how much I love to break stuff.
I’ve been doing some experimenting and I am interested in what you all see in this log. I’m not entirely sure, but I bought some props from Master Airscrew. I haven’t tried to check balance on them or anything, but it looks like maybe MOT_THST_HOVER dropped some (~.34 to about .29) so I am curious what effects you guys see in the rest of the way it is flying.
Visually it seems to want to wobble just a little bit. It doesn’t seem to affect flight in general, and it doesn’t feel like an oscillation, but it may very well be. I started to land in the middle of this flight and decided last minute to accelerate back up, so there’s a dip in the middle.