A couple weeks ago I tried running a 3s battery and the flight went horribly awry. It started oscillating wildly and basically just sideswiped a bush. Broke a prop and one motor was nearly on fire by the time I got to it. Way too hot to touch. ESC on that arm burned a capacitor lead in two, like a fuse.
Decided to replace all 4 motors and ESC’s because I wasn’t completely sure what they really were and didn’t want to fight imbalance. Ordered T-Motor 450II kit and made the swap. Of course, that required an almost complete rebuild.
Once I got it put back together, I reloaded my backup config from before the bad 3s battery test. Ran motor test to verify correct spin and location. Ran through Accel and Compass calibrations too.
I took it up for a low altitude alt hold test. Seemed fine. My herelink controller decided to lock up (completely rebooted) which sent it into RTL to land. Or at least I think that’s what happened. Once the controller came back up, I launched again. This time I started seeing jerky behavior. Not like auto-tune, more random. I think you’d call them oscillations? Anyway, it wasn’t nearly as stable. In fact, it sort of looked like the 3s test before it went completely haywire from a couple weeks ago. Anyway, I kept it in the air for a few moments and then landed.
I’m hoping someone can help me figure through the log and see what I might have going on. One thought I had was that geometry of the arms could be very slightly different than before. I think I learned something about how this frame is put together and I might have had an arm or two slightly extended farther than it should have been (not seated in the holders), but that’s just a random thought I had.
I forgot to mention there were lots of new (to me) messages. Things like GPS and Compass Glitches, EKF Lane Switches, etc, during these two test flights. The flight log shows it going way away from the house. The reality is I held it right there within maybe a 10 meter box the entire time.
I really did think I had restored my pre-3s parameters, but when I checked, there were a bunch of things that were different. I am re-loading from my backup again.
It is taking an inordinate amount of time to establish home and a position for fence. I am wondering if perhaps my GPS/Compass could have been damaged. Lights are nice and bright and nothing obvious is wrong from the looks of it.
Two things. I restored params again and rerouted the GPS cable. I think maybe I had some interference or something. That part seems fixed.
I took it through auto-tune again, which finished successfully. Then I swapped the battery and took it up for a 14-15 minute hover. Taking off, it wobbles but then stabilizes. It seemed like I would occasionally see an oscillation in Loiter mode that I wasn’t sure I was seeing in Alt Hold or Stabilize. I can’t be certain yet about that, but I think there’s something still amiss.
I don’t think that Auto Tune is good. The outputs are oscillating I would guess from high D-term. Try dropping them to .004 and see if you still see this:
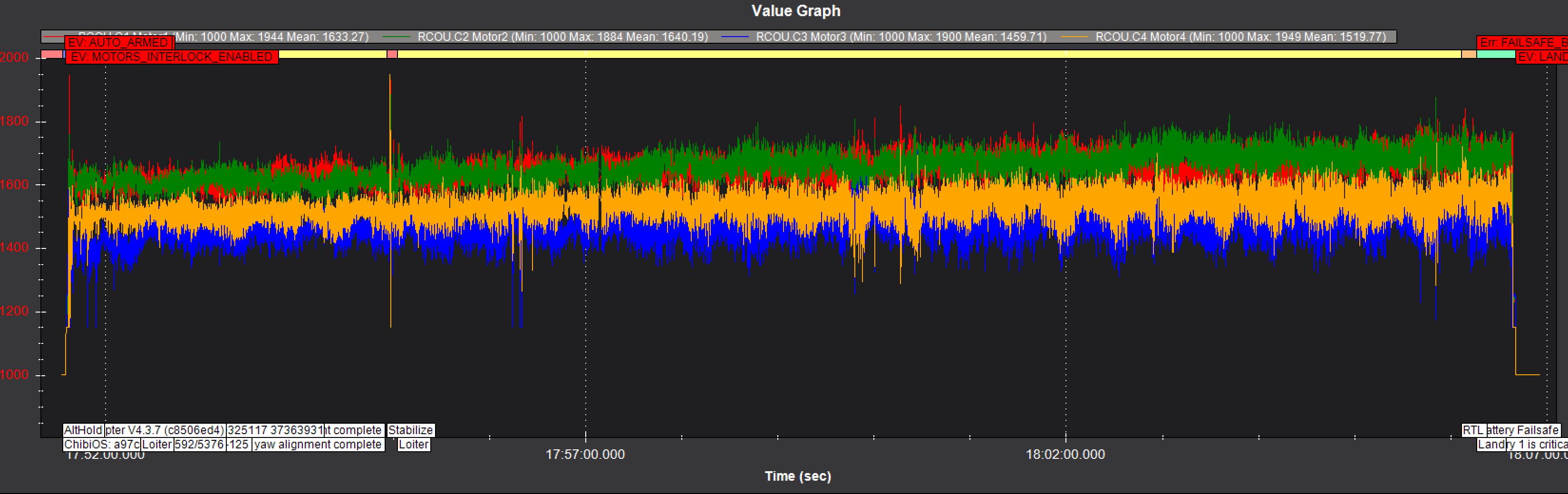
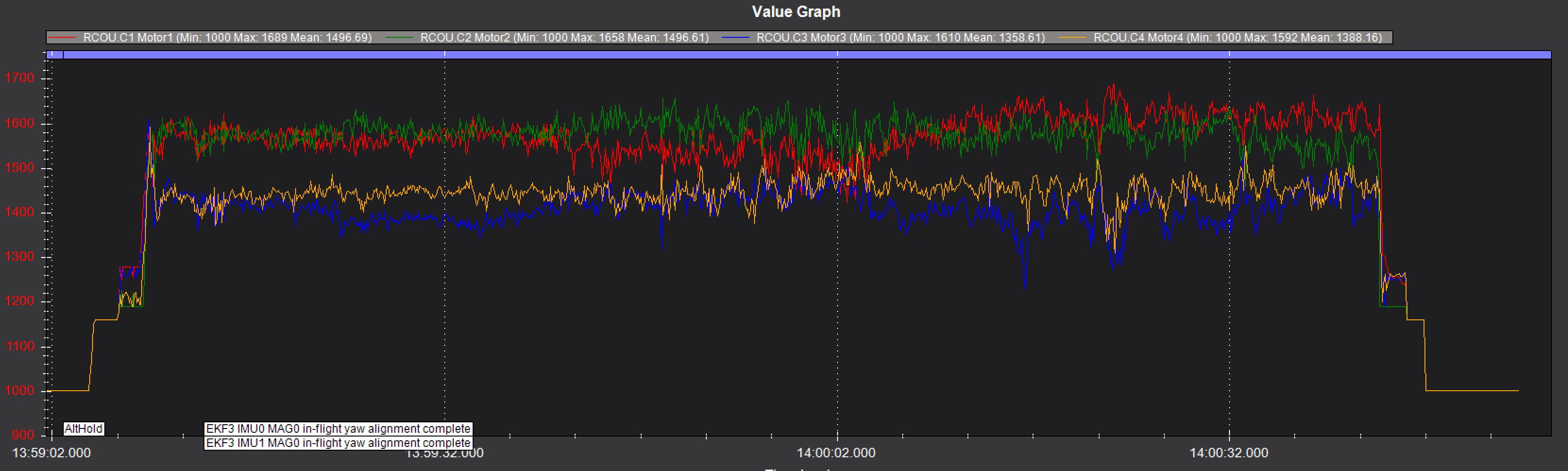
This one was pretty short. Completely not flyable in this state. RCOUT for M3 and M4 are particularly different looking to me.
I had done the motor range setup but that part was awful until autotune made whatever adjustments it made. In the motor tests, I have to hit it at 14% to make them spin, but if I set MIN and ARM the way the guide tells you to do it, it’s trying to take off at the slightest twitch of the throttle, well below the mid-way point.
Now the outputs are oscillating badly and bouncing off of MOT_SPIN_MIN. Personally I would reset the PID’s to default, because the Rate Pitch/Roll P&I are probably too high, and tune from there. It’s expected a tune for 4S will be quite different than 3S power.
I don’t know what to make of that statement. In what Flight Mode? If in stabilized of course it would. In AltHold or Loiter if it does that then the hover throttle hasn’t been learned.
Well, running through the motor setup guide gave me those values. The minimum value I could set to spin the motors in the motor test was 14%. So, +2%/100 = 0.16 for MOT_SPIN_ARM, and +0.03 = 0.19 for MOT_SPIN_MIN.
I’m going from the beginning - taking your advice. Redid the motor setup and ESC calibrations. I think they’re right now although those initial parameters held up (16%/19%). I am just now starting to get to the tuning phase after first test flight. I wonder if you’d look at this log. Yes, the first lift off I was toying around with autotune just playing around. I didn’t let it do anything and went back to altholde mode. Landed and flew another short hop. Note that I also errantly told it I had two GPS, so disabled the check for GPS config until I could get back inside.
BTW, is there a better ESC I should consider next time I am in the market for them?
Anyway set these and then do an AltHold Hover flight (no more Auto Tune until the basic tuning is done) to collect data for the Notch filter:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.44
PSC_ACCZ_P,0.22
Easy answer, any BLHeli_32 ESC will be way better than those oldies and you won’t have to worry about calibration. I would definitely replace them. 19% throttle as Minimum is not right.
I did have one motor mount clamp that was sort of more loose than it should have been, but I don’t think it affected things very much. I am still seeing c3 and 4 below 1 and 2.
Here’s a log after the above logging changes. Note I had already set PSC_ACCZ_I and P by the book, so they are basically identical to what you asked for. Let me know if what I put in there is worse and I’ll change it.
It doesn’t take much and I think you need to do more work on this to level them. We have seen plenty of data from these Hexsoon’s and it’s not typical.
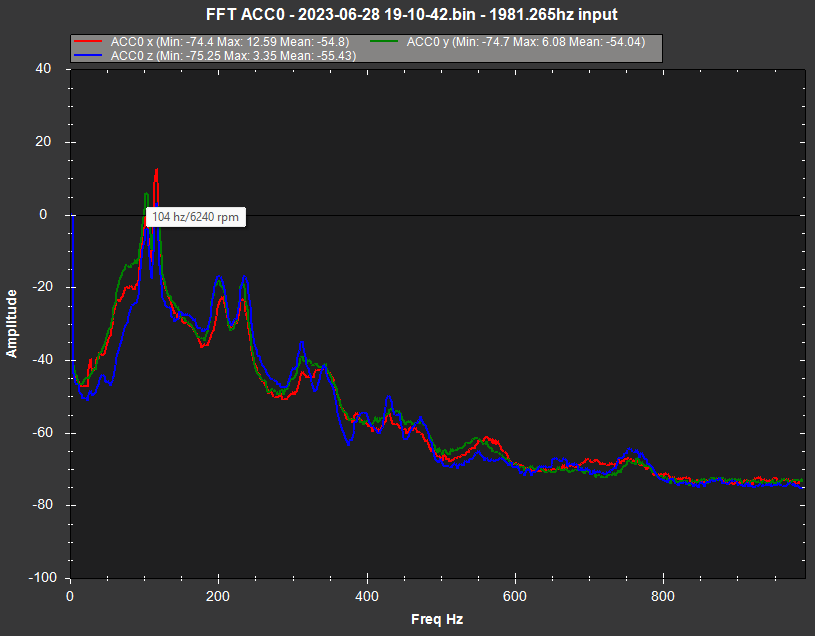
The FFT looks a bit odd. There are 2 closely couple modes at 98 and 116Hz and something ~70Hz. Is there anything loose on this craft? Maybe a photo would help.
I’m not saying nothing is loose, I am just saying I tightened that up when I found it following your comment, and I don’t see anything else yet. I posed several pictures here:
I’m going over it again. I do have some wires and things I didn’t tie back down as neatly as I had them previously, but I do not see anything structurally loose. Please let me know if you see something (besides the huge mess around it) that is causing issues.
Edit: Sorry, I think the pictures I tried uploading to Google Drive were corrupted and too much trouble… Hoping the iCloud link will work better.
Also, I tried swapping out props in case I had something bent or somehow fouled up. It didn’t make much difference, I’m afraid. Here is that log anyway
It also occurred to me I had video of this last flight (and a lot of others) with the security camera in the back yard. So here that is. Maybe you can hear things I don’t?
After realizing it was on camera I brought it closer in.
BTW, there were no really unexpected movements from the craft during the flight. With the exception of the take-off yaw to the left, I think everything was either gentle drifting around (alt-hold mode) or my input. It never started wobbling around or otherwise causing concern. And I simply cannot find anything loose. I am really hoping you can guide me to find whatever it is causing this issue.
I went through and did quite a bit more cable clean-up, tying things down. I also went through each motor mount, took it apart and made certain each screw was tight on each motor. I had used blue loctite on each one, and as far as I could tell, everything was tight already there. But now I’ve gone through them all and can say for certain.
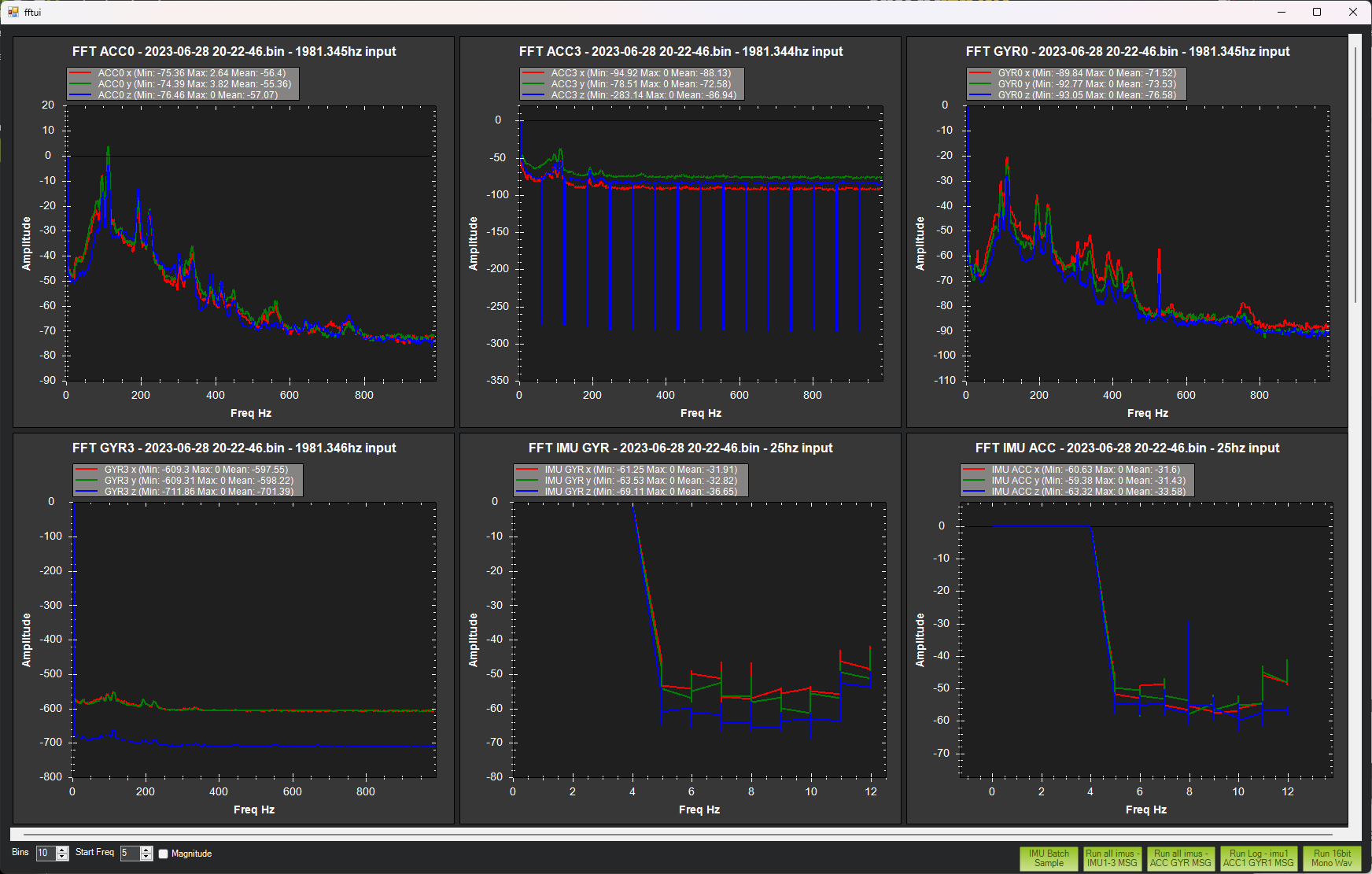
I flew it again and checked the frequency graphs. It looks like the lower frequencies are cleaner. The 96hz spike has moved slightly higher, I think. I don’t know if I can cause that to merge all into one spike around 116 or not. The 116hz spike is still there and hasn’t moved.
Incidentally I read that the TF-Luna lidar modules can cause GPS interference. I removed all of them from the config, and completely uninstalled all of them except the one pointing down, which is still powered up, just not in play. Now when I go to fly, I get a much, much quicker GPS lock. I don’t know why I wasn’t seeing this issue before. It does seem a lot faster getting a lock now than before. In any case I decided it was stupid to put those modules on anyway until I get the basic craft to fly right. I may never re-install those either.
A log graph of acceleration doesn’t tell you much and the notch filter is not active on acceleration anyway. You need to look at a linear scale of the gyro.
At this point I don’t know what it is I am looking at or what I am trying to fix.
RCOUT: C1/2 are similar. C3/4 are similar, but noticeably lower than C1/2. Is that bad? Nothing I’ve done has affected it AT ALL. All tight.
Center frequency for HNTCH… good lord. I don’t know how much cable management has helped this but it seems like nothing is changing anymore here either. Not sure how important that is given your last comment.
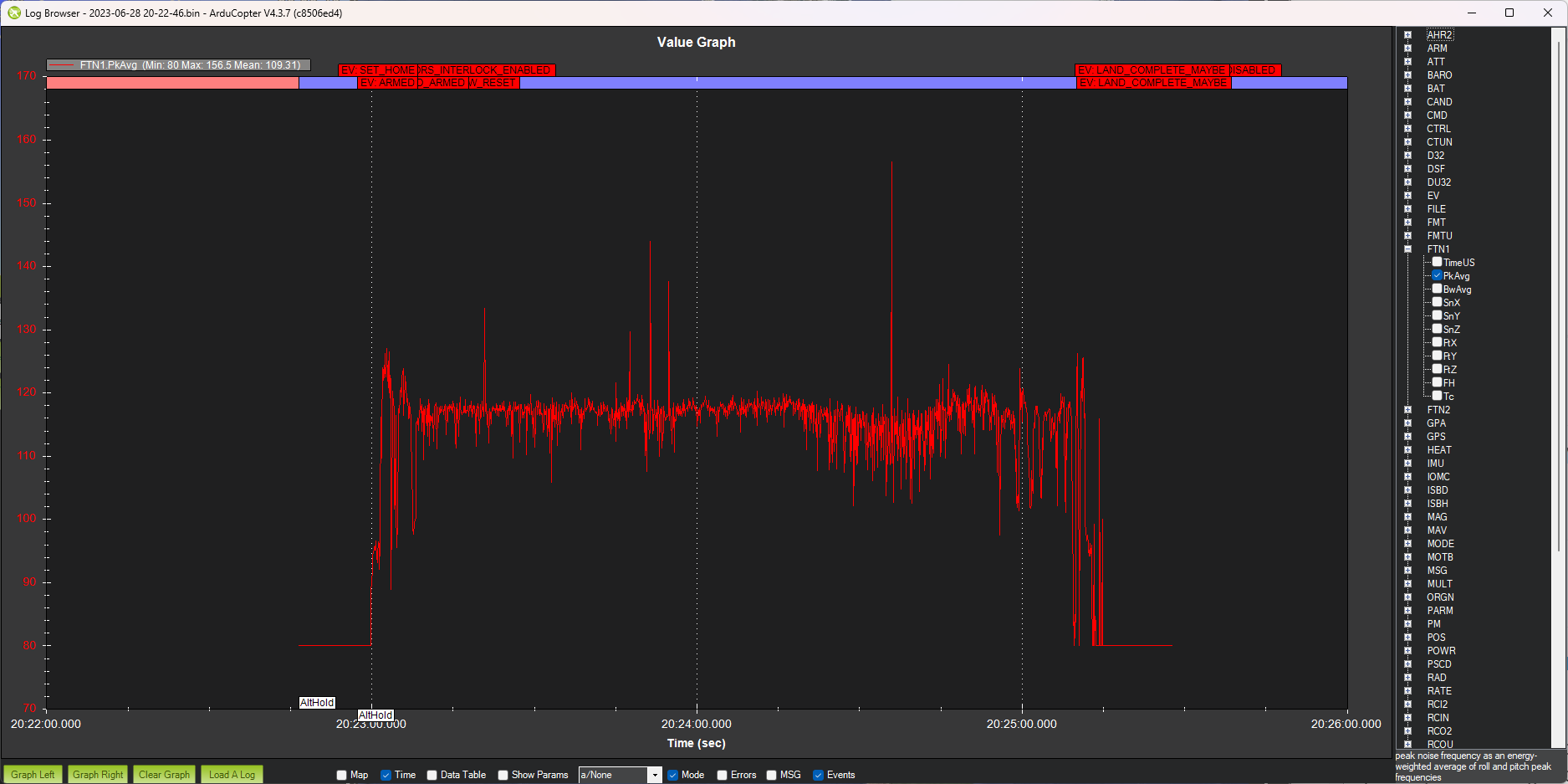
Turned on FFT and charted FTN1.PkAvg. I don’t know what I’m looking at though. The guide may seem obvious to someone who knows, but I don’t know what’s bad here or how to fix it.
Maybe just pointers to where I can read more. I’m searching the archives. There’s a ton of great conversations about this stuff, but until it is yours it’s hard to find relevance… the information is great, but the expertise between my ears is severely limited.

")