After analysing sweep result in error over frequency, I’m wondering that maybe the tandem heli pitch angular velocity cannot be well managed by the feed forward…
or maybe there is some mecanical issue or bad swash adjustment from my part.
I set for col1 and col2, -2,5° + 12,6°
and cyclic is set to +7,5- 7,5°
all the angle are fine tune and check for the 6 blades.
What I noticed is that on the ground, when I move the helicopter on the roll, the swash moves with a significant amount of travel, so that the swash tends to stay horizontal.
When I move the helicopter back and forth on the ground, the differential movement on the front and rear collective is barely noticeable.
On the ground, I went up to a FF pitch of 1, to see a movement that seemed correct to me.
However, with a FF at 1, the inputs made from the rc with the pitch stick, take the collectives from stop to stop…
In fact, it would be necessary that from my pitch inputs the collectives move 5x less, and that from the FF the collectives move 5x more.
I also tried with the Pot Tune on the FF of the pitch to go up to the max I can, starting from my initial setting of 0.17, I arrived at 0.21 and the helicopter started to make relatively slow but uncontrolled oscillations, so I went back to 0.17…
It’s weird I know… I’m scratching my head.
What you think about testing without the feedforward? there is other solution that maybe take more care about the resulting angle?
Here the att pitch des vs meas
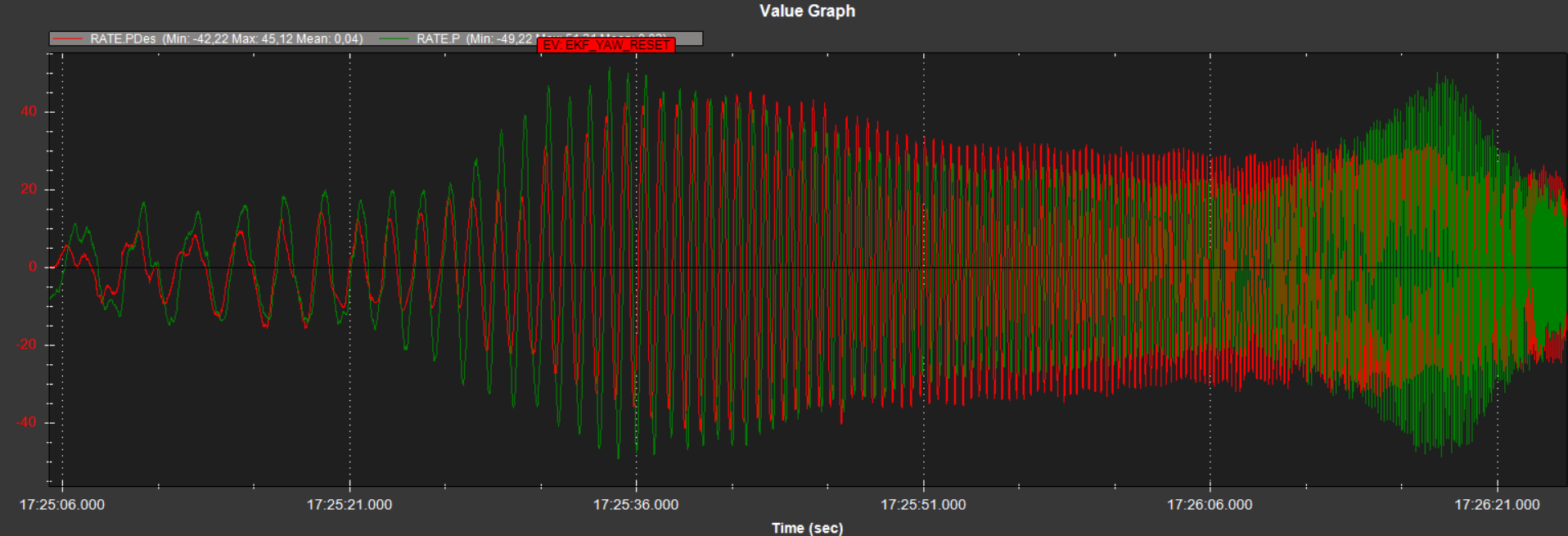
and the rate des vs meas