Hello, this my first time setup of Speedybee F405-WING on MacOS. I keep getting message error: PreArm: Waiting for RC.
From what I understood I have to resolve:
AHRS: EKF3 Yaw inconsistent 25 deg. Wait or reboot
Compass not calibrated
AHRS: waiting for home
I’ve done research and got to these points:
In parameters I have AHRS_EKF_TYPE = 3, this issue might be because of the compass.
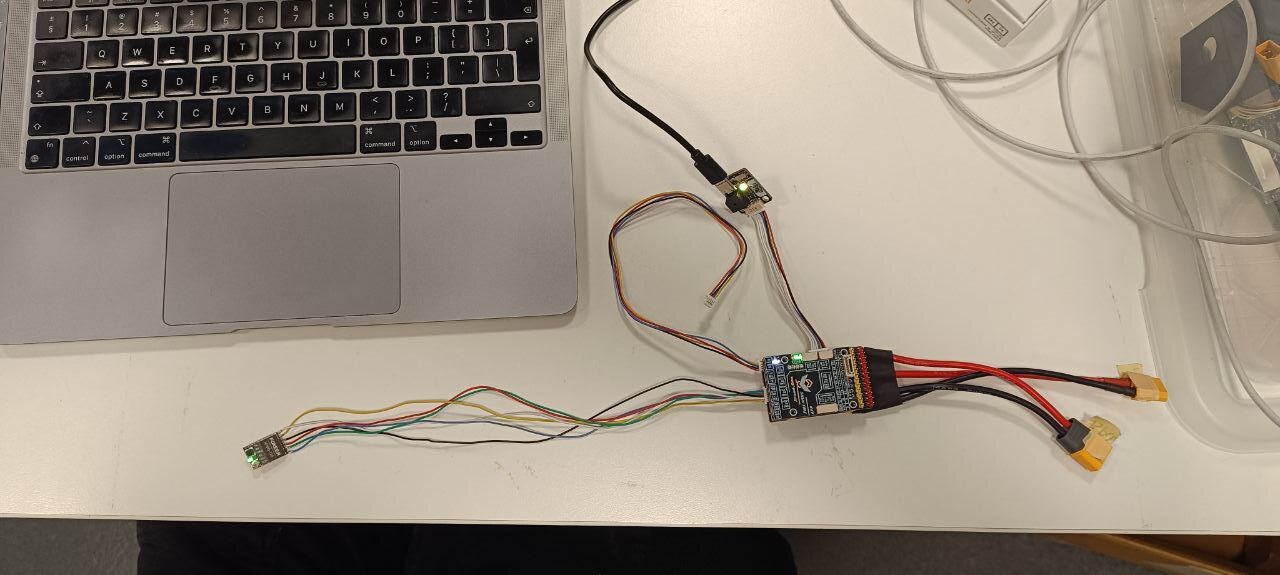
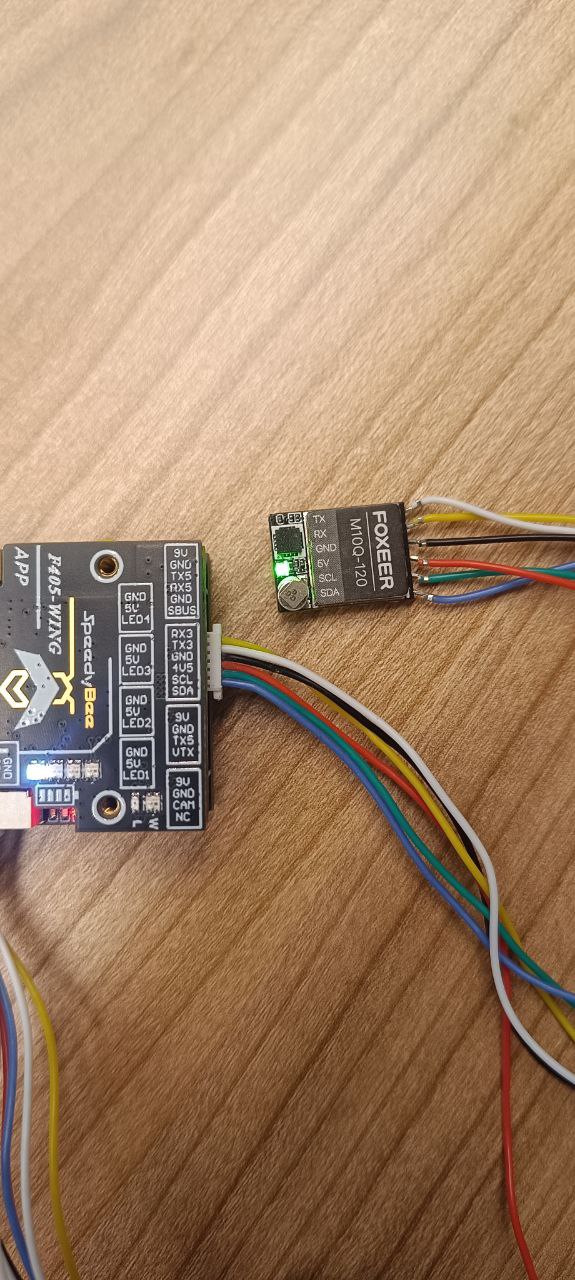
I tried calibrating the compass but it seem to do nothing, from the image it looks like the compass is connected (by the glowing green light).
Looking through the internet, it seems that by configuring FC outside where no building covers it would work. But because of other issues this doesn’t work.
Don’t do the compass calibration yet. Get the plane built and then do it. Best to do the initial calibration with the compass and flight controller mounted so the compass and the IMU move together as you calibrate. Do the calibration outside with a GPS lock and away from sources of interference.
Hi, sorry for not replying. I managed to setup RC and I’ve disabled compass. I haven’t mounted the FC yet. For the callibration how do I know that the GPS has locked? Also is callibration done in “Compass”?
It’s been a long time since I’ve used APM Planner, but simply you should see the drones position on the map. If you can get HDOP information it should be less than 1. (technically 1.4, but lower is better) You’ll need to do that outside for the compass calibration and away from sources of interference.
You might also want to check out QGroundControl (QGC). It has a Mac version and is more up to date. While Mission Planner is my go-to on Windows and Linux, I also use mac so I find myself going back to QGC.
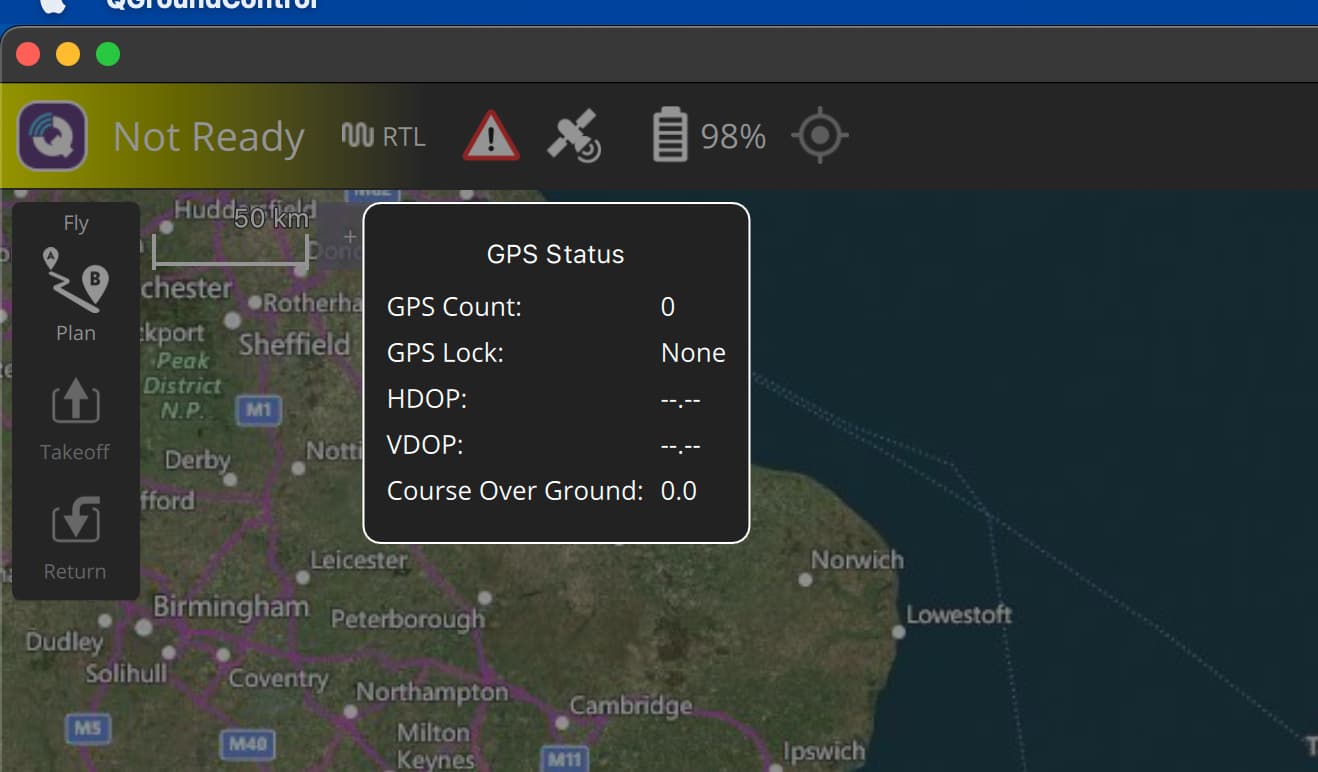
I’ve started using QGC and I’ll say that it’s alot better. I still trying to connect GPS. On QGC HDOP info is none. Console says that GPS 1 is not found.
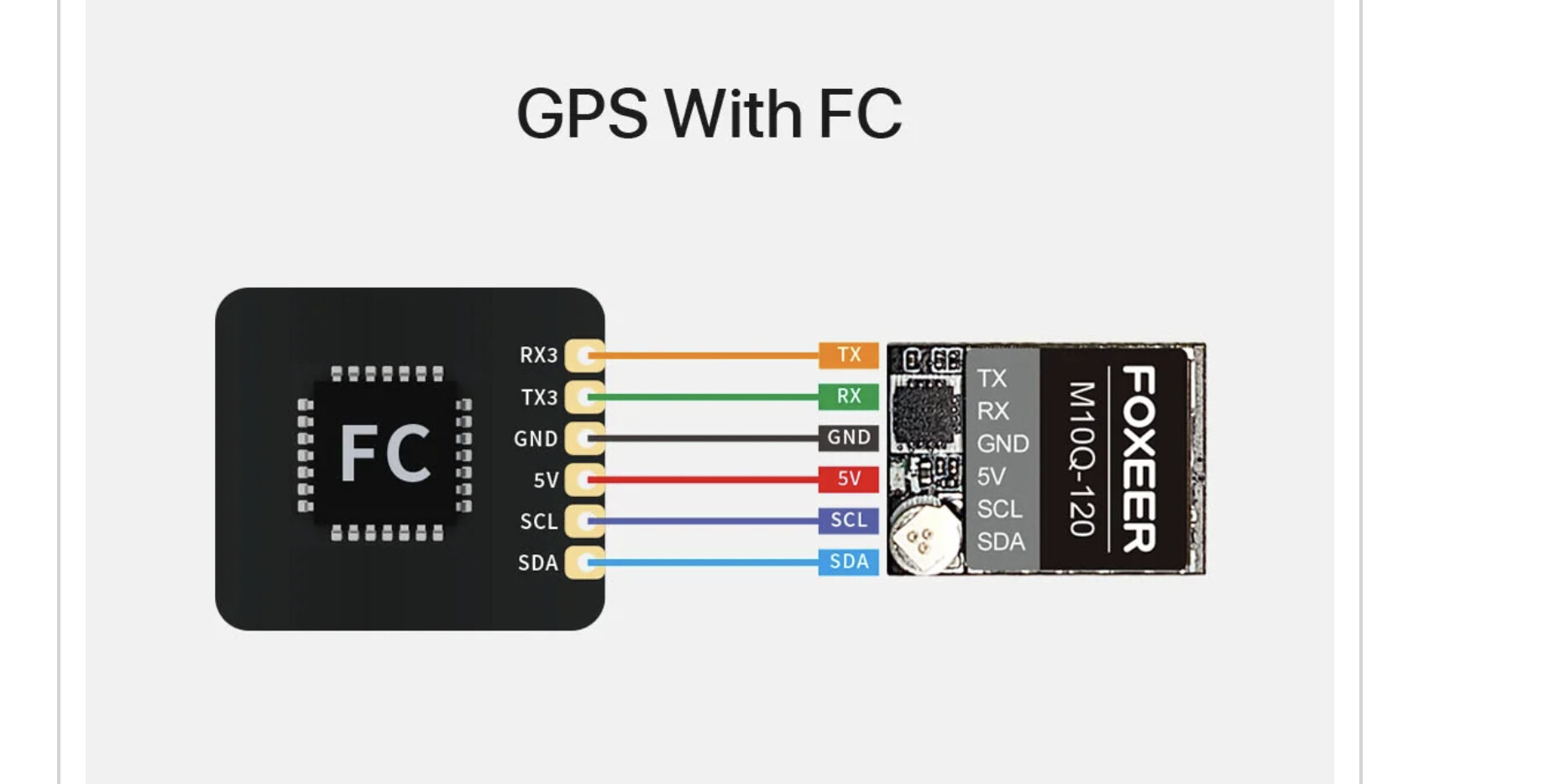
I believe its a wire connection issue, I’m using Foxeer m10Q-120, from instruction that I found link It shows that RX3 connects to TX and TX3 connects to RX.
Currently I have opposite where RX3 → RX and TX3 → TX. Could this be a problem?