hello i have a 1500mm drone
before that there was a controller dji a2, the drone did not fly perfectly, but lelat, after the crash I decided to change the old a2, which has not been supported on cuav x7 for a long time.
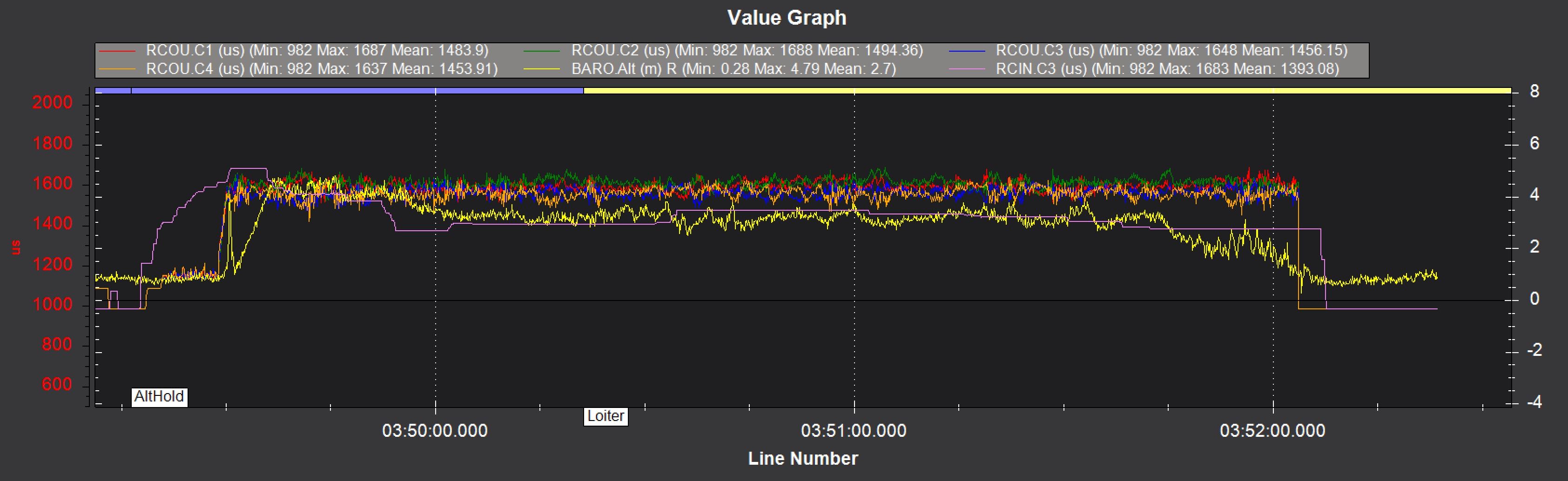
My first setup is failing, I can’t even get off the ground. I enter the first parameters using a calculator using the ALT-A command. the drone is behaving wildly agitated.
my drone configuration
cuav x7
tmutor p80 100kv
prop t-motor mf30 inches
esc alpha 80a
battery 60ah 12s
homemade aluminum frame
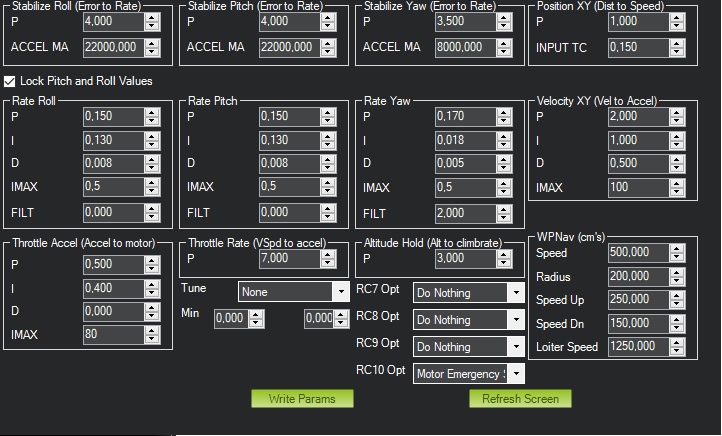
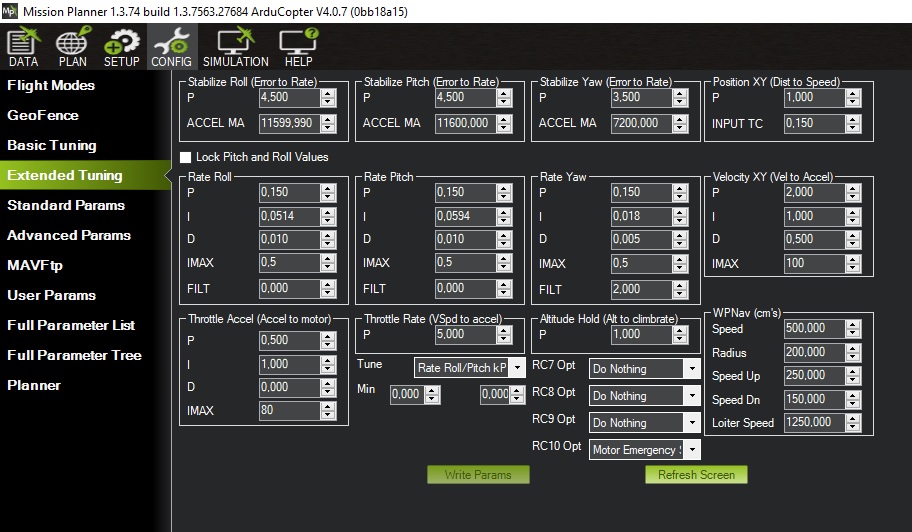
this is how my parameters look like
maybe I’m doing something wrong. I ask for help