I see no reason that it would. Build a dodeca if you want a lot of motors.
Well, that’s not really a positive way of looking at things. Personally, I see no reason why it should not work and many people in history have achieved something even though the general opinion was against them.
Persistence always beats resistance. 
I would build it differently but good luck.
Yes. That one and the notch filter and autotune pages also help
The ideal situation would be to use my mixercalc and control each motor stack individually, but for that you’d need 12 outputs, which I think is more than most FC’s can do.
I once tried 8 motors with the normal quad mixing and it worked ok, at least for gentle movements.
")
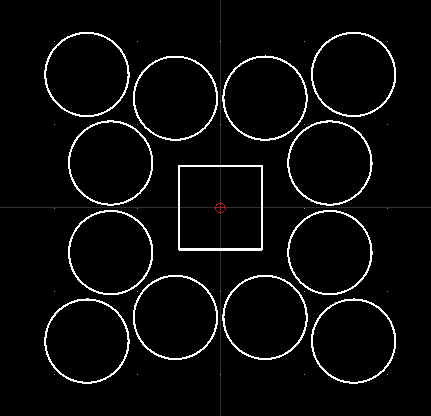
Your layout also might work with the regular quad mixing, and all motors in each quadrant spinning the same way.
Regarding the choice of layout in general, you’d want to keep all mass as close to the center as possible to help with yaw authority - the design you’ve shown is not really looking like that. In my experience a uniform circular distribution works best. I would probably try this (basically your design but with each quadrant flipped around to place more mass closer to CG)
That would likely work ok with the regular quad mixing and all 6 motors in each quadrant spinning the same way and all identical spec motors and props. If you have 12 outputs available on your FC, you could mix it property using my mixercalc. The main difference is that if you lose a motor or two, the remaining motors will respond better with a proper mix.
Wow. Great input. Thank you super very much.
I think looks like a very interesting approach however I do question some of the advantages. It will be way harder to mount and wire the smaller motored option- how could it be easier wiring and controlling 24 motors v 8? Critically howeer I would look at thrust values you can get from the motors v the weight of the motor prop esc combos. You will find the larger motors will give you a much better thrust to weight ratio especially when you add in all the extra wiring.
Moreover, if you take 2.7kg thrust per motor (this is the highest thrust I can find for a 15inch prop so I could be off the mark here) then of course you get 24x 2.7kg thrust in total = 64.8kg. However in coax format you will loose approx 15% thrust due to inneficiency of the design so straight away you are at 55.08kg of actual thrust. Now that’s at max chat and you need at least 20% of that as headroom to allow the copter to be controllable so 44.1kg useable thrust if you are at its limit. This would not be a nice copter to fly especially on a windy day.
Cubes, offerings from CUAV and some others have 12 outputs and support a Dodeca hexa.Even the Wing boards from Matek would do this.
Thank you very much for sharing your ideas. Actually, I also calculated around 40kg. But, as I mentioned before, this is for proof of concept. The final design should be able to lift 50kg payload.
I made the first frame out of stainless steel, as I don’t care about payload at this stage. The frame weighs about 6kg. If I add all the rest, I come to about 25kg, which is still way under MTOW. If this concept turns out to work well, the next step will be to gather all data and design the next step.
But I’m still wondering a bit about the initial PID values for this frame. 1.5 x 2 mtrs, 25kg…
Also bear in mind, for this concept I spend about $1500. Which is quite cheap. I don’t mind to scrap the whole thing and start from zero.
That is true, however, then there will be no channels left for other equipment like camera control, payload release, gimbal control, etc.
I was just replying to his statement about 12 outputs. No lack of those.
Well, the reason for my design is to create a “safe zone”. Because of the size of this monster, I need place to stand safely in order to connect the batteries and arm. With this design I have about 75cm in-between the props, on the side of the frame, to stand safely.
This prototype is meant to give “proof of concept”. The next stage will be to upscale to the design to a MTOW of around 100kg. As you can see from the design pictures, it will have like a cargo box underneath that also needs to be easily accessible.
I’m making good progress with the construction and I will probably be able to test this prototype by the end of this week. I’ll be very happy if I can just hover a bit and see if it is stable.
It works. It was quite windy, but nevertheless reasonably stable:
1 Like
Take off weight was 24 kg
Lol interesting draw
Hi, Is there any similar way to do this in QGround Control?
Nope.
You have to use the excel version to calculate values and enter manually.
Excel Sheet is deleted, Please share, if possible.