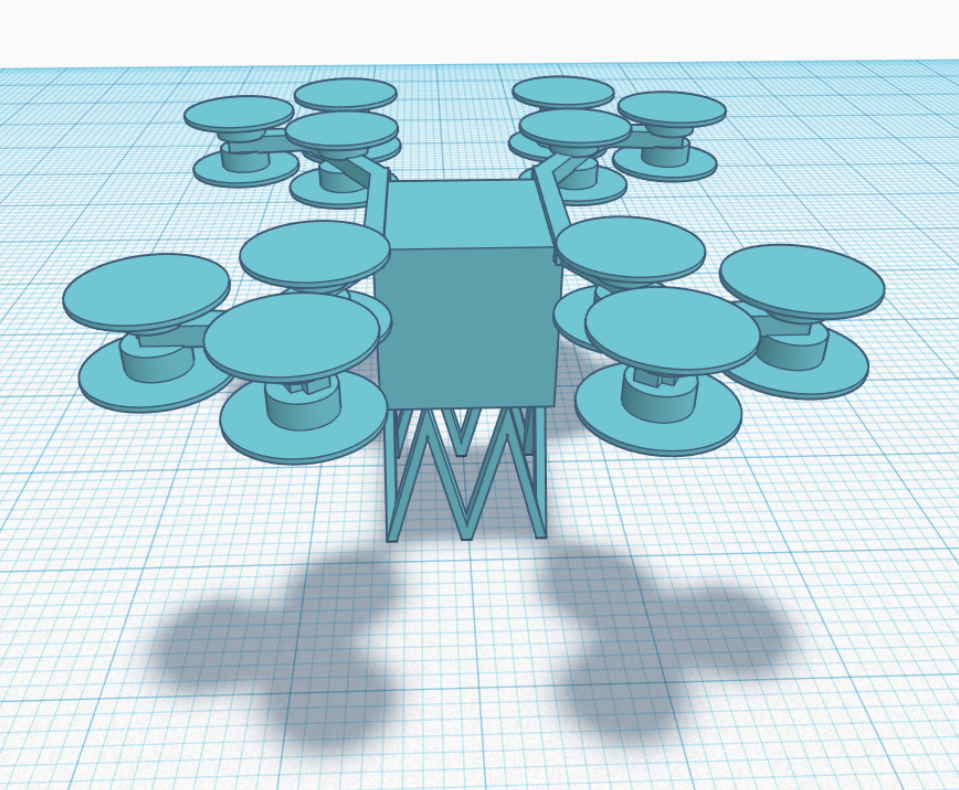
I’m in the process of designing a heavy lift drone. The target is to be able to lift up to 50kg. I’m starting with a smaller version to lift 15 kg, MTOW around 45 kg.
It is an octoquad design, dimensions 1.5m wide and 1.9m long. Empty weight will be around 25kg.
I’m not sure if the standard PID values will be a good starting point and I look for some help.
Hi Andras-For 32" props the Plug-in suggests Rate filter values of 8Hz and in some recent cases this has been too low. Raising this to ~11Hz has fixed some tuning problems. What is your experience with this? Also, note that the ATC_ACCEL_P/R_MAX values go to zero ~38" prop. So my suggestion is the Plug-in functions probably need some tweaking in this regard.
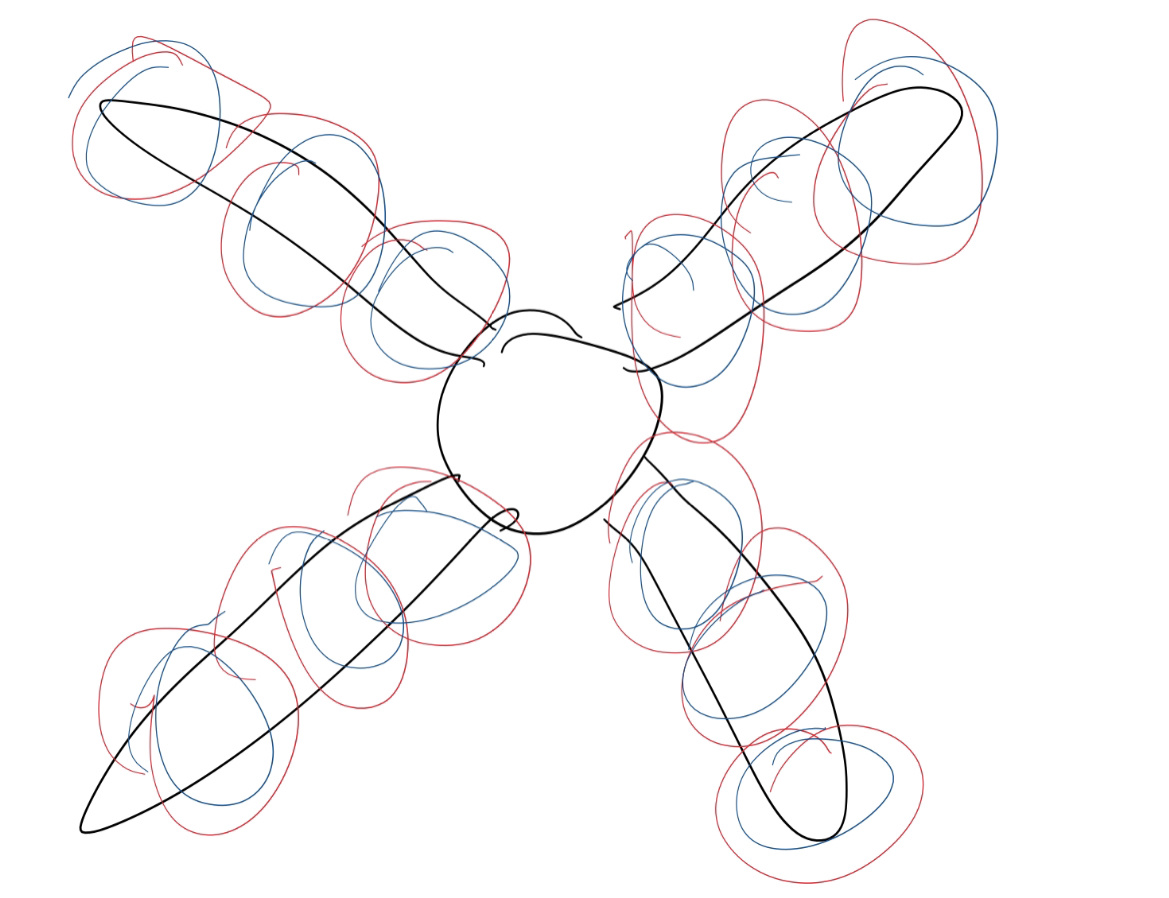
Well, the idea is to use an octo-quad configuration where on every end 3 props spin in the same direction, as if it is 1 big prop. So on the left top, 3 spin CCW, down 3 spin CW. So together. And the same for the other sides.
In my idea, these will act as big props of around 30".
I do have quite some experience with Ardupilot and a lot of the wiki is just basic information. Would take a lot of time to read the entire wiki. Could you indicate which section provides information on how to tune big frames?
You want to keep in mind that smaller props are less efficient than big props, and you’ve got a lot of additional weight and complexity overheads.
For example, an Octocpter has good redundancy but has to use small(ish) props or they wont all physically fit together without overlapping, or the frame has to be incredibly large!
A regular quad is much more efficient because it can use larger props and there’s less overheads (weight, complexity) but has no redundancy.
An Octoquad (X8) is somewhere in between - large props are possible and there’s redundancy. There’s still some extra weight and complexity, but hopefully it’s outweighed by the better props.