The ideal situation would be to use my mixercalc and control each motor stack individually, but for that you’d need 12 outputs, which I think is more than most FC’s can do.
I once tried 8 motors with the normal quad mixing and it worked ok, at least for gentle movements.
")
Your layout also might work with the regular quad mixing, and all motors in each quadrant spinning the same way.
Regarding the choice of layout in general, you’d want to keep all mass as close to the center as possible to help with yaw authority - the design you’ve shown is not really looking like that. In my experience a uniform circular distribution works best. I would probably try this (basically your design but with each quadrant flipped around to place more mass closer to CG)
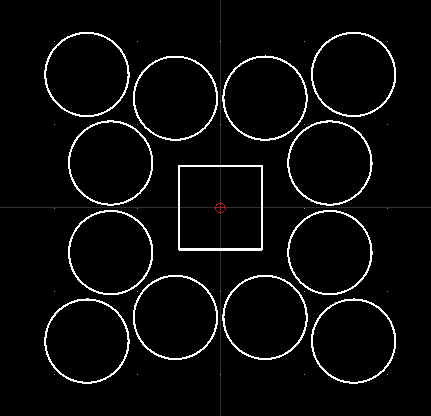
That would likely work ok with the regular quad mixing and all 6 motors in each quadrant spinning the same way and all identical spec motors and props. If you have 12 outputs available on your FC, you could mix it property using my mixercalc. The main difference is that if you lose a motor or two, the remaining motors will respond better with a proper mix.