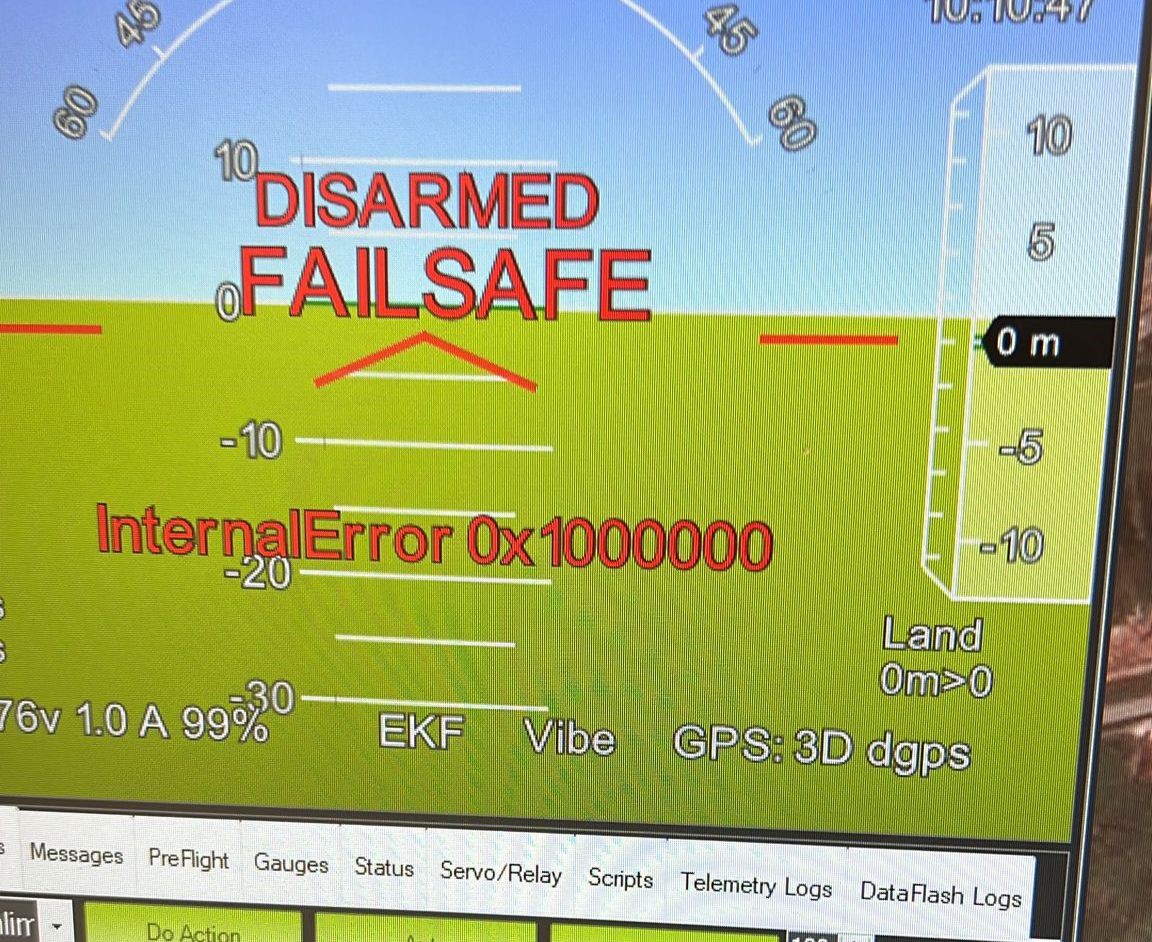
Same board H743-Slim, fly the master of today, same error exactly when I switched to position hold, also detected it during an Autotune.
ESC, 231820961, 0, 8495, 8542, 18.13, 5.81, 50, 274, 0, 0
ESC, 231820967, 1, 7657, 7657, 18.06, 5.78, 50, 337, 0, 0
ESC, 231820999, 2, 8514, 8542, 18.06, 5.52, 50, 320, 0, 0
ESC, 231821005, 3, 7600, 7600, 18.08, 5.45, 50, 312, 0, 0
ERR, 231821016, 30, 1
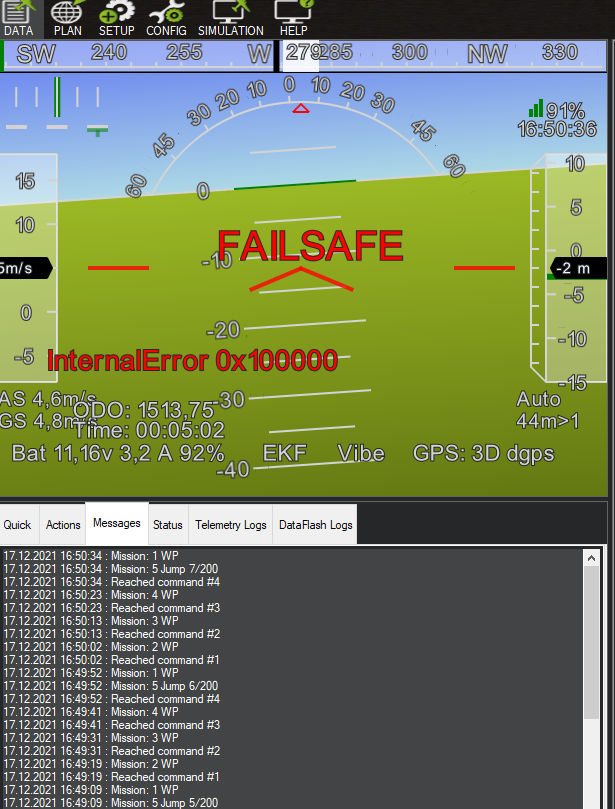
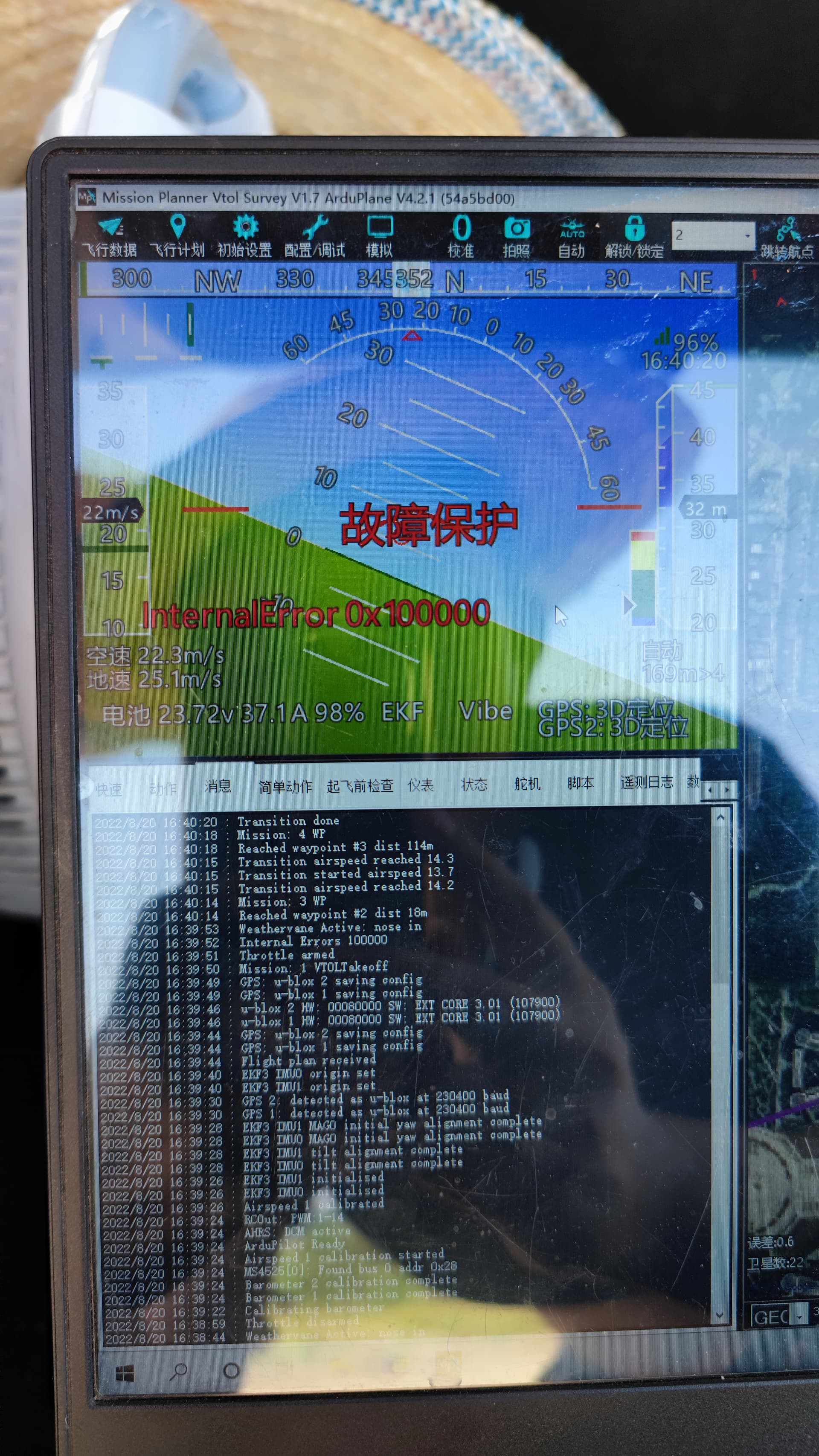
MSG, 231821028, Internal Errors 100000
RFRF, 10, 0
RFRH, 231821367, 6026
RISI, -0.01287492, 0.0004963517, -0.01989855, -0.0001963262, 0.0001628904, -1.343864E-05, 0.00150832, 0.00150832, 15, 0
RISI, -0.002518023, -0.004039068, -0.008407761, -0.0001350282, 8.357844E-05, 2.012618E-05, 0.000998745, 0.0009987513, 15, 1
RFRF, 10, 0