Hello,
I’m using MRO Pixracer Pro with HEX Here flow sensor (optical flow).
I’m having problems with flying forward and backward in a straight line.
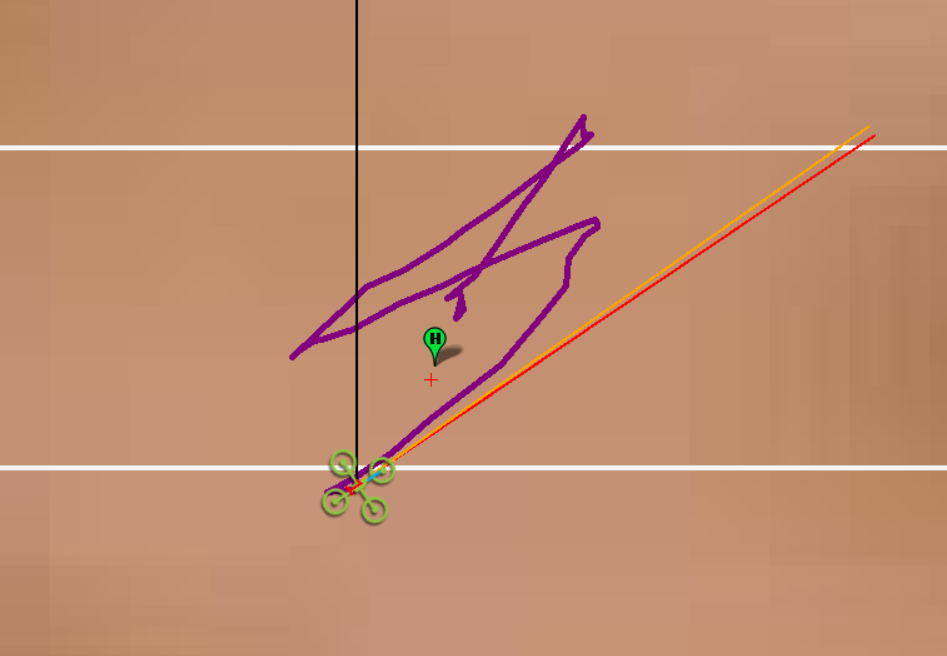
In this screenshot I tried to flew only back and forward. I used only the pitch in the remote. as you can see in the screenshot it actually indicate the real situation.
I tried to change all the params that belong to the optical flow that i found in the docs and in the mission planner full parameter list. but noting change this problem.
I found that the slower i move the bigger the drift to the left and right
parameters:
params_h1.param (18.0 KB)
arducopter version:
4.0.5
I’ve also tried it on the latest vertion 4.0.7 and it behaved the same.