Hi Guys,
I am setting up a 4kg Quad with 17" props and 340KV motors at 6S Lipo. The Drone has plenty of power, so in stabilize i am able to push the throttle stick, and the drone accelerates and climbs crazy fast and very directly to the throttle stick.
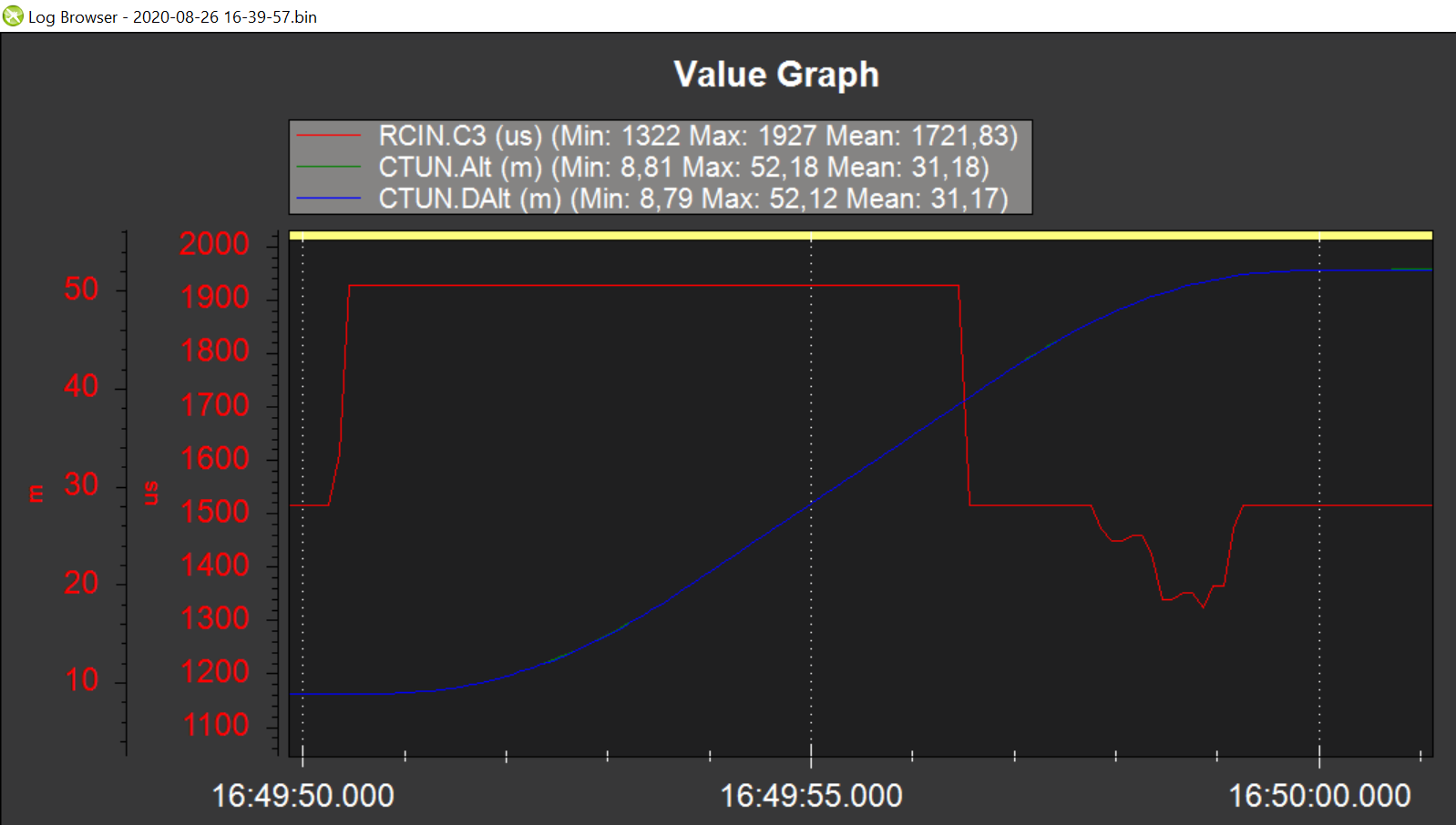
As I switch to any mode that uses a barometer (e.g. AltHold, Loiter), the climb rate is limited by PILOT_SPEED_UP. Thats OK and i reach this SPEED_UP value after climbing at full throttle for about 4 seconds long (see picture).
My problem is the big time delay to reach this value. I know it is possible to accelerate faster, because it is possible in stabilize mode. How can i gain more direct response to my throttle stick in a barometer related mode? I want to reach full climb rate (7m/s) within one second of full throttle and i also want to stay at about the same Altitude, when i leave throttle from full to hover position during max. climb ascent or decent speed.
By the way I also want to limit the acceleration and max power in stabilize mode at full throttle  it is to hardcore for the drone.
it is to hardcore for the drone.
I use Arducopter 4.0.3. with the Herelink (no Tx mixer opt ions for limiting in stabilize)
Thank you,
Lukas Buxbaum