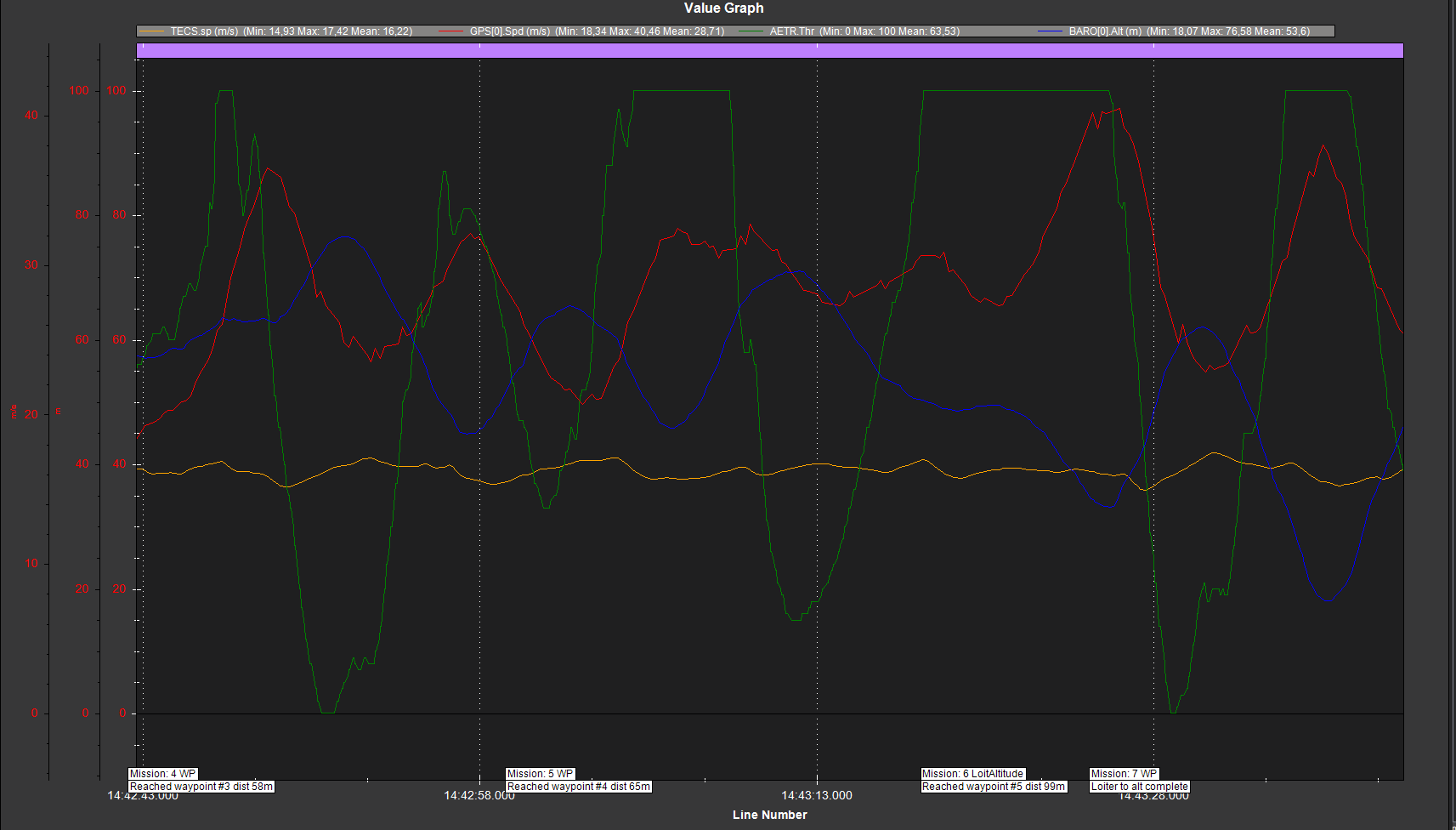
As you can see in the log (link below), the altitude is very inconsistent in automatic flight modes, oscillating between 40-80m. The throttle goes up from 0-100% and back down regularly instead of remaining constant.
My assumption is that the PID tune is off, leading to these oscillations. Could that be the cause?
Set SERVO_AUTO_TRIM to 1. You need to fly a bit in FBWA or another stabilized mode to get it to trim out the servos for you.
Verify that the center of gravity is correct. Wings can be touchy. Given how much it’s running the throttle to keep altitude it may be trying to make up for something. If I had to guess I’d say say it might be tail heavy, because of the speed oscillations, but again that’s a guess.
PID tuning needs to be done. Don’t do this until your 100% on the C of G, but it really needs to be done.
The servo auto trim is on. the servo throw is about right. the C of G was confirmed. all the auto flying has altitide Oscillation. Throttle is keep changong from trim throttle to full. The attitude changes 20 meters above up and down.