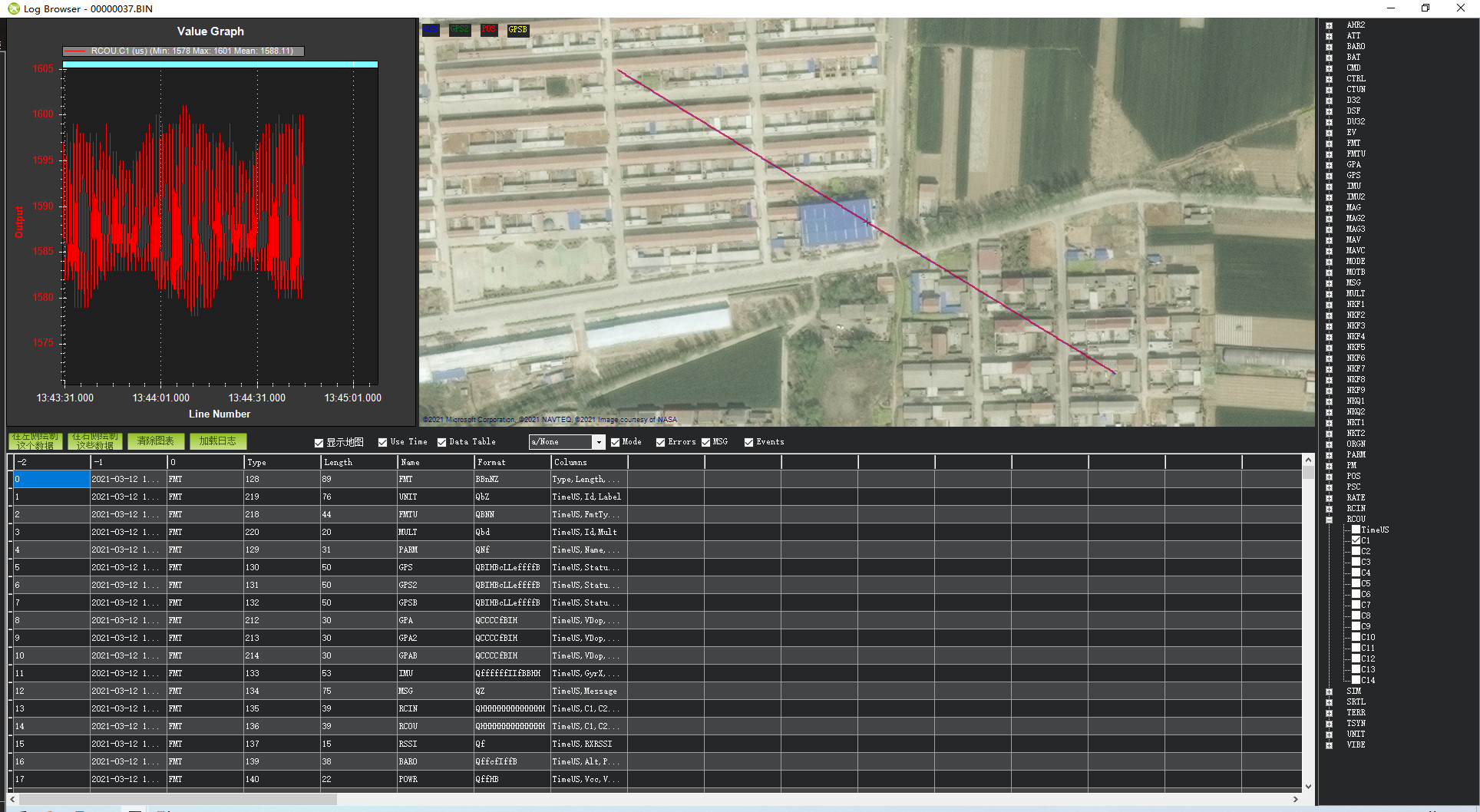
I was running SITL simulation and connected to the mission planner GCS. In the guided mode, after flying a certain distance, I found that the attitude of the vehicle was jittering and the ground speed was also unstable. The raw sensor data and the SITL gyroscope data are not stable?
AFAIK some real-world noise is added, yes.
Thank you, how to eliminate this noise?
Play with one of the many SIM_* parameters
OK,Which SIM_* parameter?
Thank you very much for your guidance, but I have not found the relevant parameter. Which parameter is it?sitl.zip (373.9 KB)
I checked the relevant code and shielded some random noise, but the result is still not ideal. I know that SITL is the relevant result calculated by outputting pwm, and this problem cannot be solved by single.
Hello, did you manage to solve this problem? I have exactly the same problem and I have been dealing with these fluctuations for several days.