Hi There,
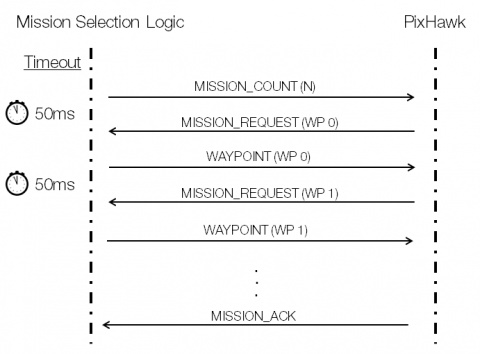
I have set up a mission according to the following protocol:
I have successfully upload the request item to the EEPROM
mavlink_mission_item_int_t packet;
memset(&packet, 0, sizeof(packet)); // Clear structure to be safe.
packet.target_system = vehicle_id;
packet.target_component = autopilot_id;
packet.x = m_missionPoints[index].lat;
packet.y = m_missionPoints[index].lon;
packet.z = m_missionPoints[index].alt;
packet.command = MAV_CMD_NAV_WAYPOINT;
packet.seq = index;
packet.param1 = 0;
packet.param2 = 0;
packet.param3 = 0;
packet.param4 = 0;
packet.frame = MAV_FRAME_GLOBAL;
packet.autocontinue = 0;
packet.current = 0;
however, when setting the flight mode to AUTO while in flight the drone changes direction and seem to be flying towards (0,0) position…
any ideas?
Thanks,
Ron
