I think @proficnc said it’s not even used for firmware
No connection from gimbal to IMX6 at all.
The gimbal just connects to the cube directly
Thanks for that @proficnc.
I have been wanting to reverse engineer the GoPro control, so I guess to clarify the question, although the Cube controls the Gimbal, does the IMX6 control, or have input to the camera control?
I feel a bit dark towards GoPro for keeping that interface so locked up.
Its the only missing piece, as I see it, to a real Open Solo in every respect.
the iMX6 has nothing to do with the gopro either.
The gopro commands are via ardupilot (look in the solo gimbal controller) and the gimbal itself… its these codes in the gimbal that are not released by go-pro… which is pathetic, they have nothing to loose by releasing these. I wish I could send the code to you, but i am not allowed to
As always, thanks for your insights @proficnc.
I am aware of GoPro’s ridiculous attitude towards their interface which is doing them nothing but harm.
In the Solo there are some scripts run on the IMX6 that provide “Camera control” for things like cablecam shots. Indirectly controlling the gimbal via the Cube. But as stated not the Gopro itself.
Mike, opening up the Solo gimbal code won’t help you much unless you want to stick with the old Hero 3/4 models and the Solo gimbal hardware.
The Hero bus protocol is to some portion implemented in hardware, and differs from model to model. Noone has hacked that to my knowledge.
Also, Arducopter supports only a very small subset of Gopro functions anyway.
A good alternative for developing your own Gopro controls is the (un)official Gopro wifi api from Konrad Irtube. It’s implemented in Python and supports all Gopro models and every single Gopro command and settings.
Based on his work, I developed an interface for Solo which allows you to control all the newer models including the Hero 7 from your Solex app.
Hope that helps
2 Likes
but this does it via wifi, right?
the wifi approach isn’t any new, and there had been (and still are) legitimate questions as regards whether it’s a good idea to have a strong wifi pair close to 2.4GHz receiver(s) to detect weak signals on an airborne vehicle. Some say it’s working fine, some say it’s stupid to do. My impression is that the more a person is presumably knowledged in the matter the more that person tends to say the second. And I must admit it makes sense to me.
Unless this has been settled to 100% (and I would like to see data-based analysis of confirmed experts in RF, not of hobby wannabees)(like me) I think one should be careful with advertising such approaches as ultimate solution … unless you are willing to take the responsibility, which I however doubt you will.
I’d like to say it’s great work you’re doing, but there is this - IMHO - important grain of salt.
as always just my 2 cents
Olli in industrial IoT environments yoy have dozens if not hundreds of wifi connected sensors and devices running in parallel side by side w/o interference.
The problem with Gopro wifi is rather the possible interference with the GPS, what you can avoid by proper shielding.
And, with the Hero 7 you can even switch to 5.8 GHz. 
in industrial IoT environments yoy have dozens if not hundreds of wifi connected sensors and devices running in parallel side by side w/o interference.
LOL. This is exactly the type of argument which I think is nonsense. An IoT environment really has nothing to do with that of a flying vehicle miles out.
Anyhow, I made my statement, and I believe it has some technical background. You guys are of course free to do what you want. It would be just sad if this hobby would get under even more scrutinty because of people just hoping for the best.
My opinion. You’re of course free to have yours.
![]()
Appreciate your opinion Olli.
I have not encountered any issues yet with my Solo nor with my other drones by having a 2.4 wifi access point (Gopro or APsync) on board.
I have to say that due to the regulations in my country I am flying LOS only and therefore I can’t share practical experience about what could happen when you are a mile out.
And again, if you want to be 100% safe also for long range flight, you can switch the Hero 7 to 5.8 GHz what will prevent any potential interference with your RC by the law of physics 
Edit: and as with any mod on the original factory setup, you are on your own risk with what you are doing.
I should just add a note that if you are using the IMX6 with the original Solo code you can get control over a third party gimbal with the Cube and IMX6 using OlliW’s Betacopter fork of Ardupilot and his STorM32 series gimbal controllers. You will not get camera control because of the reasons mentioned with the GOPRO Hero bus. But these days with large SD cards you can get away with just turning on the camera on the ground and recording the whole flight. With the original Solo controller you can get the benefits of the advanced cablecam shots. This seems like a lot of what this conversion is about, after just getting the cube to work with the IMX6.
I am a big fan of using the original Solo mainboard parts for DIY “FrankenSolo” projects.
1 Like
Hi Mike,
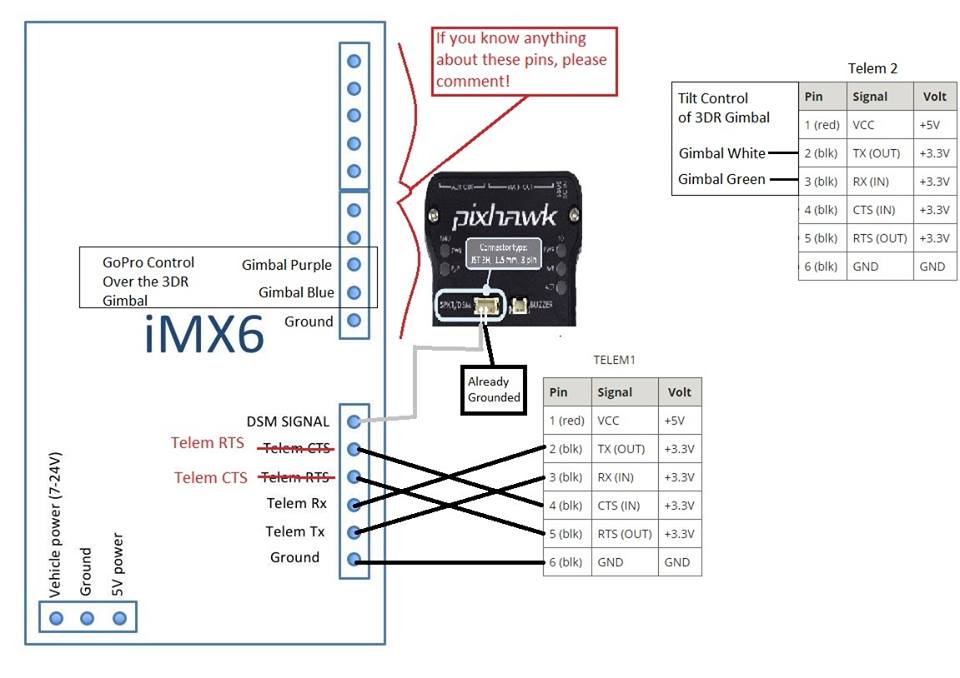
Any chance of a confirmation of the wiring diagram? Is it as the first image depicts or i it using the middle pin on the spectrum port?
Which Spektrum pin did you use the middle or pin 1?
Thanks! thats exactly what i needed
A more complete analysis here: https://madhacker.org/3dr-solo-imx6-as-video-and-telemetry-link
1 Like