@rmackay9 - I hope you don’t mind me tagging you on this post.
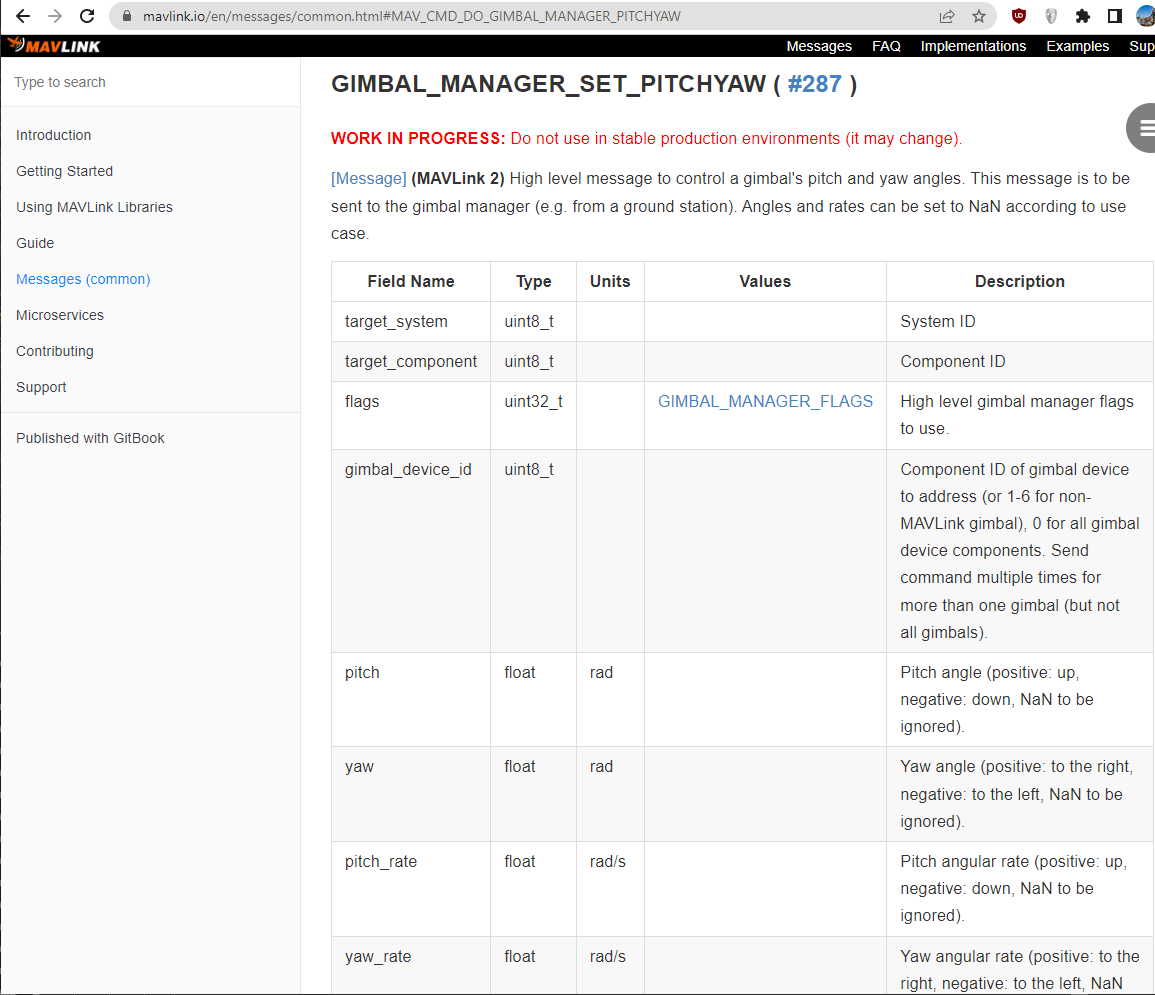
I haven’t looked into the new gimbal control functions for Gremsy gimbals - but today I noticed the new Mission Planner mission statement: DO_GIMBAL_MANAGER_PITCHYAW

In my previous missions I’ve used the DO_MOUNT_CONTROL to control my gimbal.
I looked up both these commands in MavLink.IO and I’ve got some concerns:
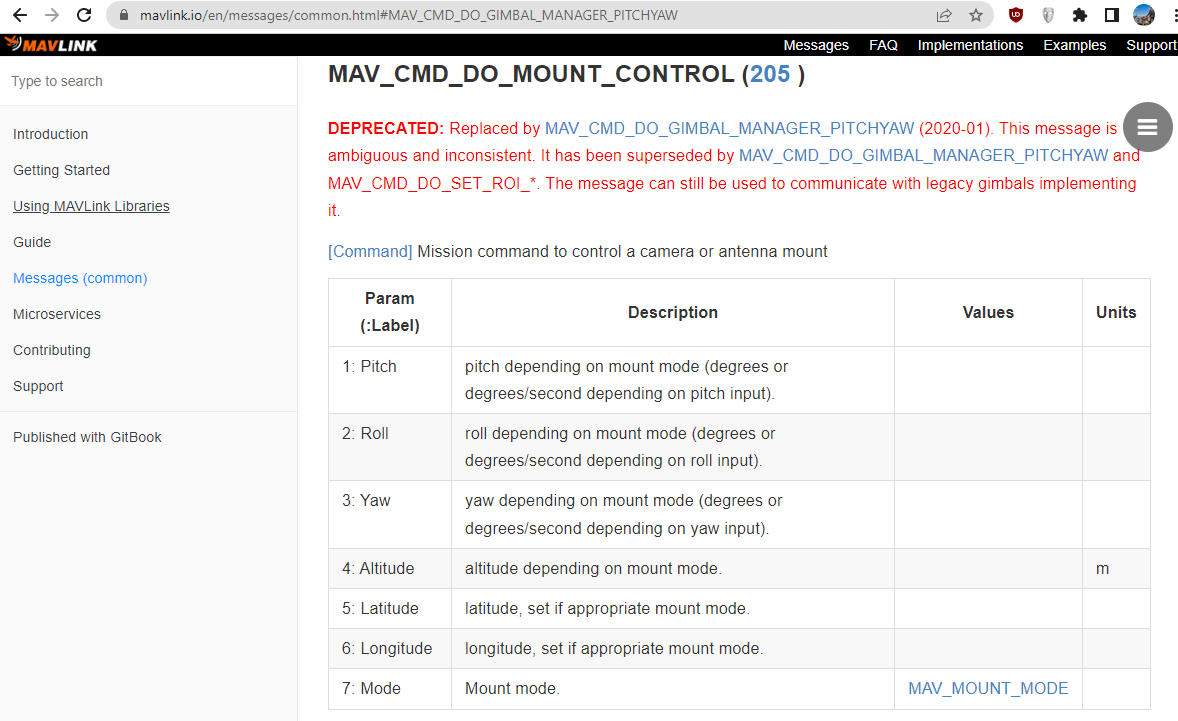
These references say that MavLink 205 (DO_MOUNT_CONTROL) is not deprecated.
As I recall, ArduPilot supports a number of deprecated MavLink commands. Can someone please confirm that DO_MOUNT_CONTROL is one of them - and will continue to be supported?
I also noticed that MavLink 287 (DO_GIMBAL_MANAGER_PITCHYAW) is a MavLink 2 command.
Storm32 gimbal controllers support both MavLink 1 & 2, but I think the vocabulary of MavLink 2 commands is limited to the specialized GoPro controller boards that were never really adopted by many users.
AlexMos only supports MavLink1. According to AlexMos docs, it’s proprietary serial protocol has extended functionality. ArduPilot has this option - but I found that AlexMos controllers work better with just MavLink.
I’ve recently been talking with a representative of ViewPro. She confirmed that their Z-6KA7 product has encoders and supports MavLink. I’d be really surprised if they developed their own controller with these features - so I’ve asked her to see if she confirm that they’re using an AlexMos controller. (AlexMos supports encoders. As I recall Storm32 encoder support is not well developed - if it exists at all)
I’m glad to see the effort the DEV’s have applied to have better support for Gremsy gimbals. The gimbal market has been dormant for many years - but it now seems to be springing back to life.
If any of the new MavLiink commands support proprietary Gremsy functionality, then these should be well identified in the MavLink docs - and maybe the command names.
If the new MavLink commands are generic - I hope new gimbal manufactures have enough information to take advantage of them.
Testing the DIY products such as Storm32 and AlexMos would also be really useful.
Thank you.