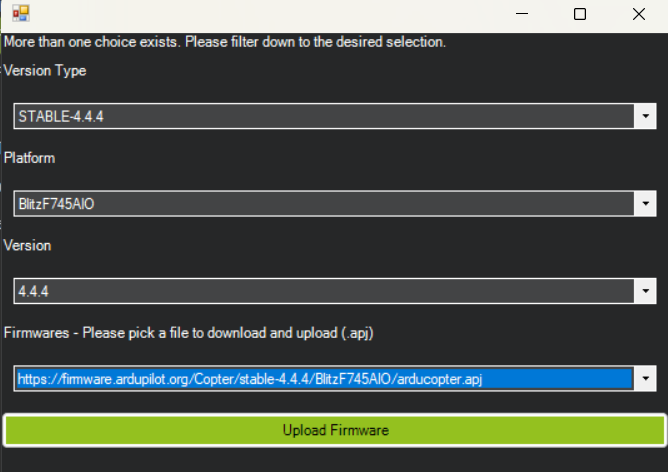
Initially I connected the receiver to all possible SERIAL ports, but none of them worked. After re-flashing the bootloader, I connected the receiver to SERIAL1
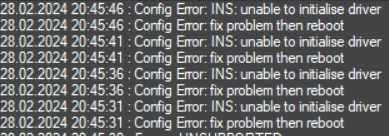
Was tried to check throughout cli config - no luck.
And nothing similar in the configuration tool.
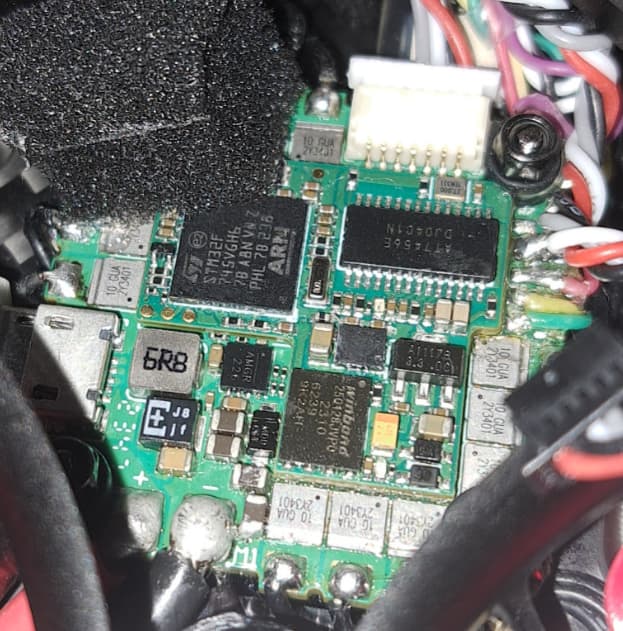
Looks like it’s somewhere in the middle of the board. Between two plates.
Otherwise I can try to install inav. As I remember it can show type of sensors
Ok, they changed the IMU. Usually with these its a pain to figure the orientation. So I will do you a build and ask you to post a video of the HUD in mission planner as you rotate the vehicle so that we can work out what the orientation is.
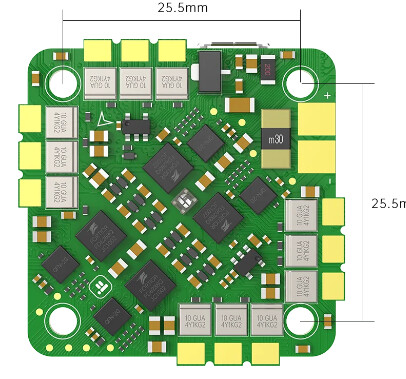
Based on that picture from iFlight website:
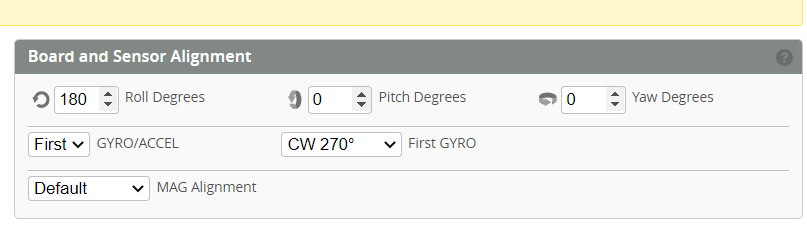
we need to rotate it 135deg CCW
I can’t disassembly drone to get real ways of things. As practice shows information on their site is wrong
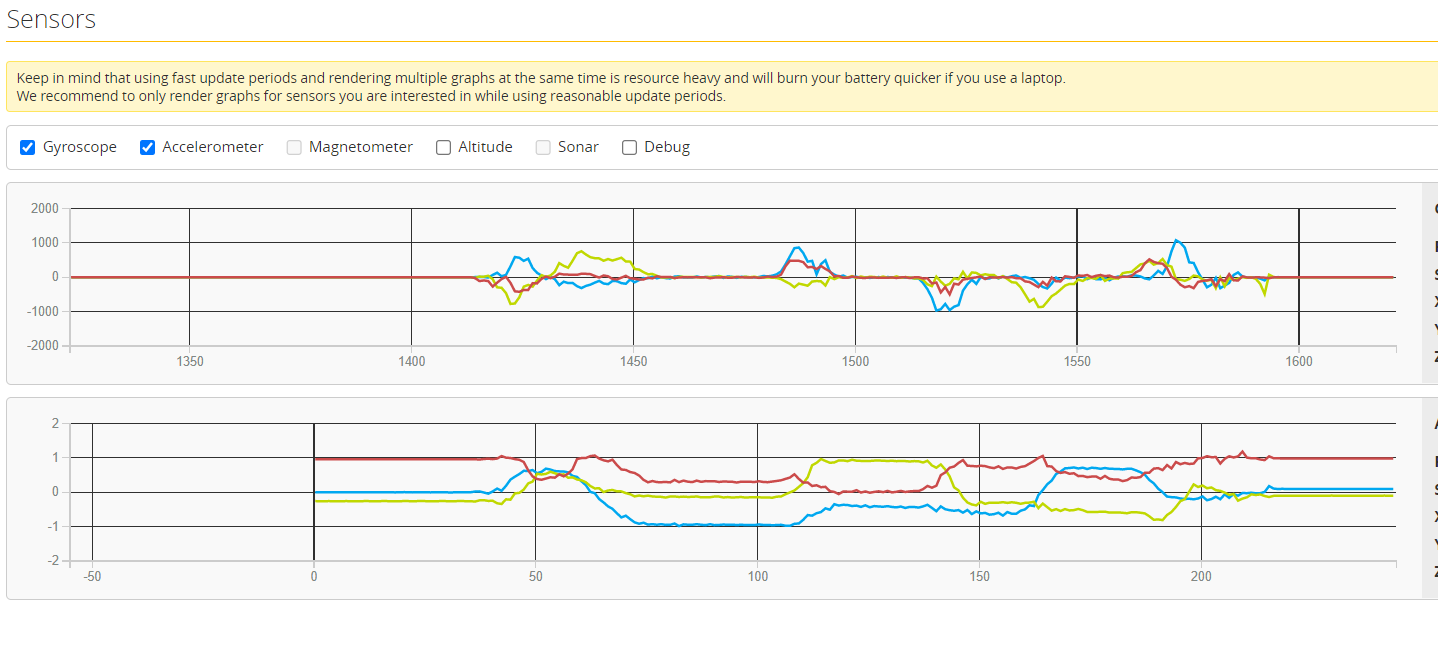
Did you try the firmware? The ICM-42688 is weird in the orientations it presents. I’m not asking you to disassemble it - merely hold the drone in an orientation that means that the board is level, arrow facing forward and uppermost. The orientation within the drone is set by a different parameter.
Ok, I suspect this might be hard to get right because you have a non-standard orientation inside the frame. If you can please make sure that AHRS_ORIENTATION is correct for the board orientation - it might be something like 11 - Yaw135Roll180 - and then the rotation of the drone should be correct for the rotation of the board if we have the hwdef orientation correct.
Here is a firmware using the existing bmi270 which uses ROTATION_ROLL_180_YAW_135 - lets see what that looks like. Firmware is in the same place.
Sure’ I’ll change it. But I do have only 45 deg YAW CW rotaion from the arrow
The forward direction of the board is located diagonally across the drone (you can find that moment on video)