Hello.
First, since I do not live in a country where English is spoken, I would like to say that the level of English is low.
If you don’t understand my question, please leave a comment. Thank you 
As the title suggests, the goal is to have a stable hovering in the GPS shaded area.
First of all, I knew that an optical flow, Lidar sensor is needed for indoor flight, and I tried it already, and I flew safely.
Now i want to go one step further and use ZED and TX2 for reliable hovering without GPS.
As I saw the related information in wiki, I confirmed that to use ZED, disable EKF2 and activate EKF3.
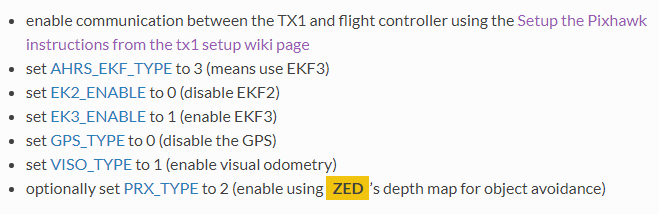
If I understand correctly, does disabling EKF2 mean that it does not use all parameters associated with EK2_xx with Optical flow, Lidar?
So, if i follow wiki, when i use ZED its only fly in outdoors (in an environment without GPS) and cant fly indoors? (Because cannot use a range finder such as lidar)
To sum up, my ultimate goal is to fly under bridge and indoors, and I think all ZED, optical, and Lidar should be available for that, but is this not possible?
In addition, wiki is disable GPS when set up optical or zed.
If i activate GPS, don’t the sensors work?
In the environment in which the GPS operates, use the GPS. Then, if GPS flies to areas where it doesn’t work, I want to use sensors to fly.
Thank you for reading my question.
