Hello, I need your help with “Large Vehicle MagCal”.
So far I have always used the usual method to calibrate the compass by spinning and swiveling the helicopter in all directions.
However, it is not fun to twirl a 10 kg scale helicopter around in the air.
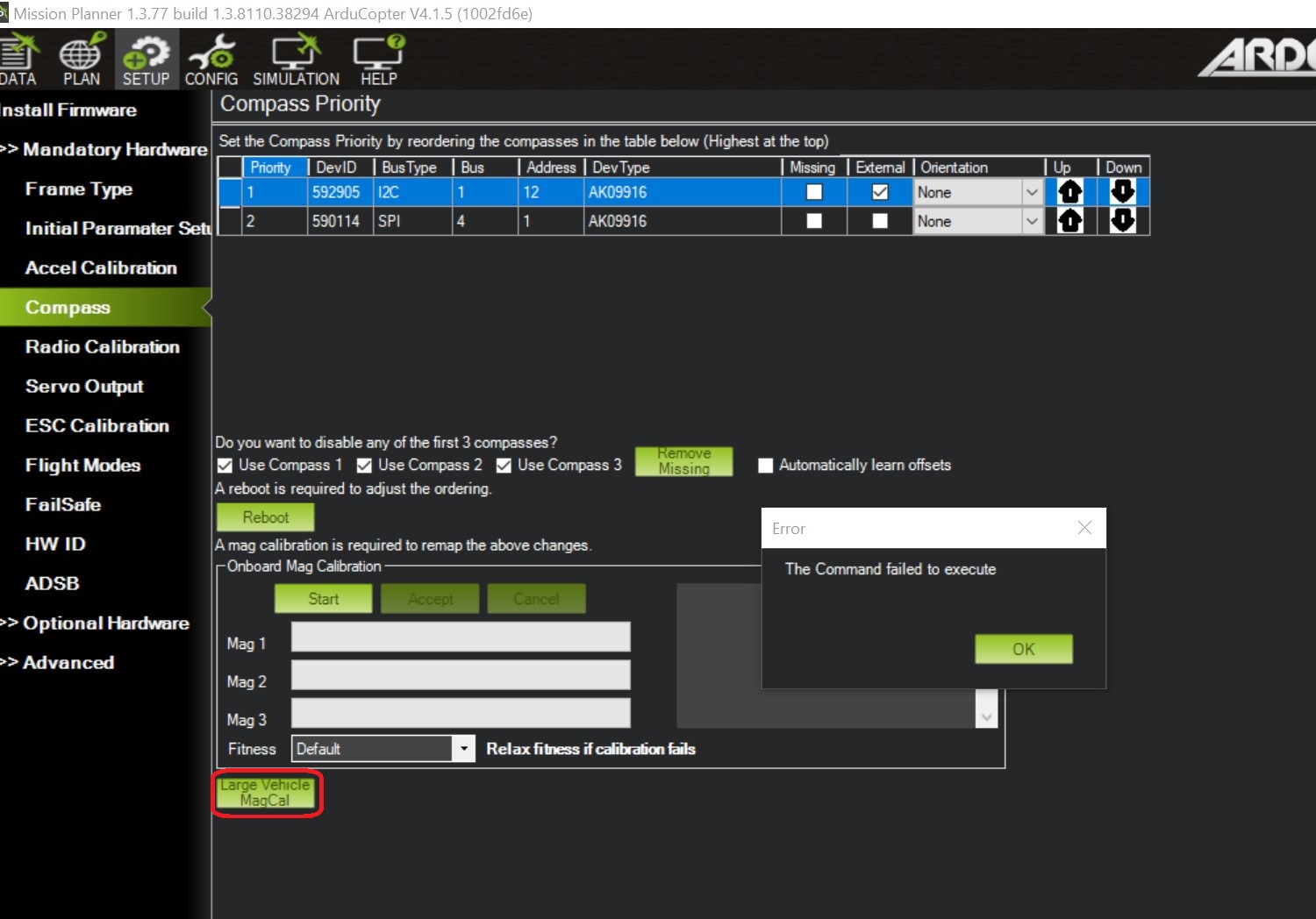
Therefore I tried the function “Large Vehicle MagCal”.
The helicopter is equipped with a Pixhawk mini4 and an external compass/GPS module. The internal compass is disabled. I always do it this way.
I have aligned the helicopter with an analog compass with the nose exactly to the north (360 degrees / 0 degrees). Then I entered “0” in the input field under the function “Large Vehicle MagCal” in the setup menu and saved the value.
Gladly I went to my model airfield and switched from “AltHold” to “Loiter”. The heli went into a sideways tilt almost immediately. Only by quickly switching back to “Althold” and countersteering could I catch the heli again.
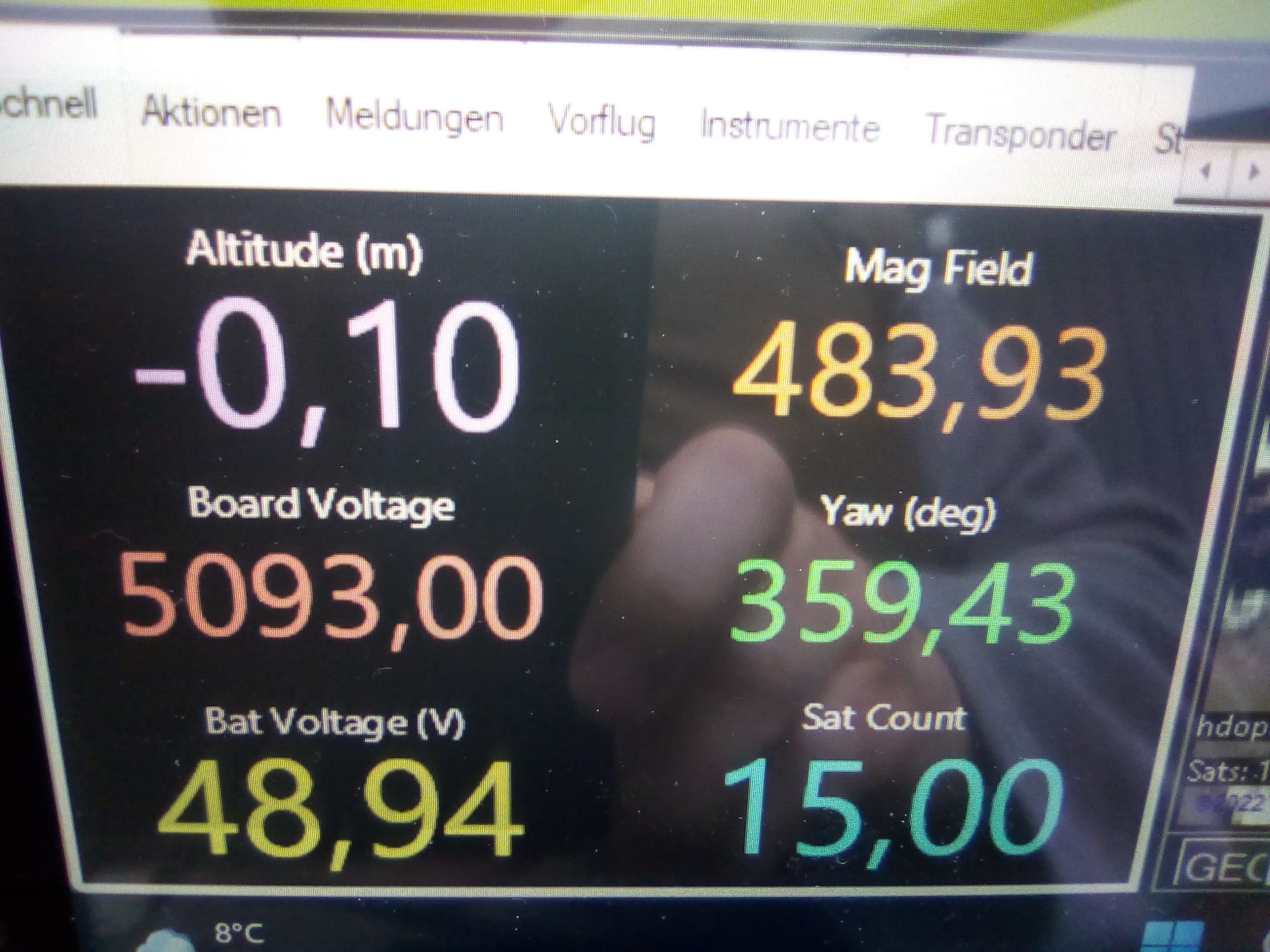
At home in my garden I have now aligned the heli once again with the analog compass exactly on north. And have entered in the function “Large Vehicle MagCal” again “0” degrees and saved. Afterwards the Mission Planner showed me under the value “Yaw” however a value of 6.58 degrees.
Shouldn’t the value “Yaw” now also show “0” degrees?

For the test, I now entered the value “354” degrees under the function “Large Vehicle MagCal”. And the value of “Yaw” changed to “359.43”.
Hence my question:
Do I have to correct the value “Large Vehicle MagCal” in my case (nose aligned to the north) as long,
until the “Yaw” value is almost at “360” degrees?
Would my compass now be calibrated well enough?
I would be very happy about some more explanatory words than in the wiki.
What I also noticed during my garden setting attempts:
I had all the rotor blades disassembled and could also run up the motor and observe what happened to the “Yaw” value. The moment I switched from “Disarmed” to “Armed”, the “Yaw” value increased by about + 0.40 degrees.
At this point the engine was not yet running!
As the engine ramped up, the “Yaw” value continued to increase, up to almost 7 degrees. After switching off the engine, the value decreased by these 7 degrees. The compass/GPS module is mounted about 3 cm above the drive belt for the tail rotor.
Running drive belts sometimes generate an electrical voltage.
After this observation, I tentatively positioned the compass/GPS module further away from the drive belt (about 6 cm) and tried again.
Now the “Yaw” value changed only by switching from “Disarmed” to “Armed” by about +0.40 degrees. However, little changed when starting up the engine.
Now I wonder, was the wild reaction when switching to “Loiter” a miscalibration the cause or the displacement by the running drive belt.
Thanks for your help.
BR
Heri
{kind=link}