I am trying precision landing using IRLOCK.
I set up PLND parameters like as follows
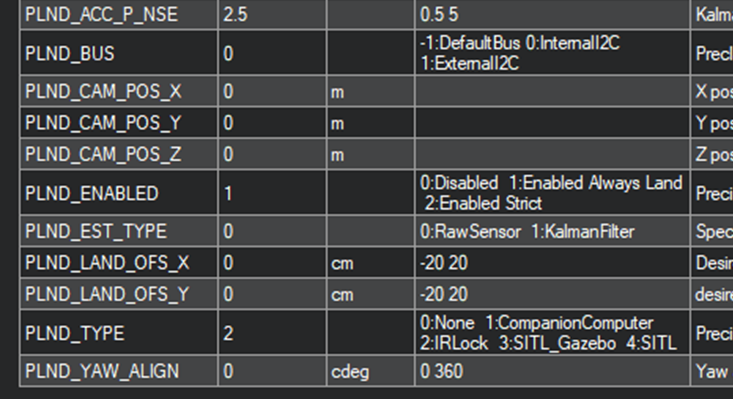
IRLOCK firmware is MarkOne_1.0.1.hex and I checked the sensor was tracking beacon well using PixyMon version 1.0.2.
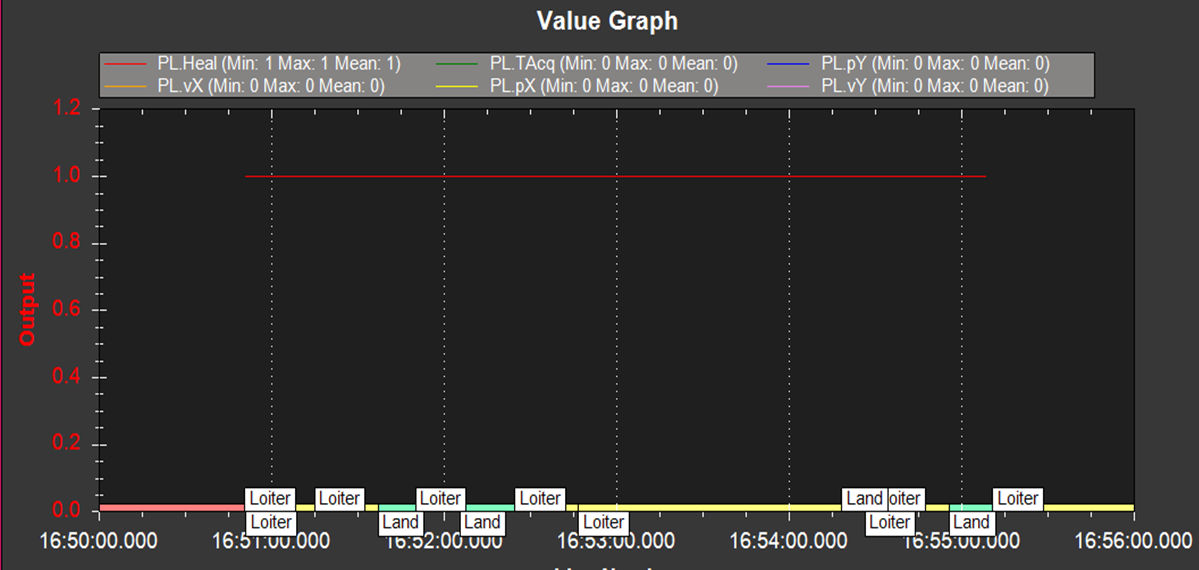
I tryed precision landing flight test several times. but, It didn’t work.
when I saw the log, PL Heal = 1, and other things are zero(Tacq, pX,pY etc.)
and rangefinder must be needed when precision landing?
somebody, could you tell me what’s wrong with this situation?