I am a PixHawk2 cube black / Quad firmware 4.0.5 user.
I want to do precise landing using PixyMon.
But this doesn’t seem to work
I have seen the articles at this link.
However, in Mission Planner, only Bad Sensor Position is displayed.
Actually, my quad didn’t elaborate the Land.
rr.param (18.1 KB)
This is my Param.
This is a parameter of a dummy drone made purely to drive the Pixymon.
What should I set up?
As stated in the documentation, the’Plnd’ parameter was modified.
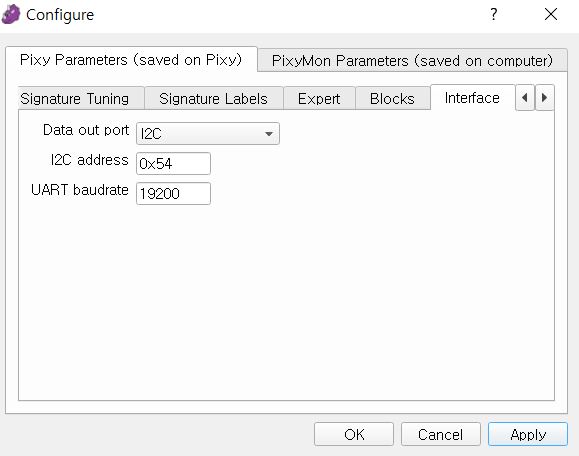
Pixymon is now the Default parameter.
Do I need to change the Pixy settings too?