Hello.
I’d like to get some advice on automatic tuning.
As a drone beginner, I made a drone with the following specifications, and I’m currently trying to tune it after Autotune, but there’s a problem.
specification
- Frame: F450
- Motor : T Motor 2213 / KV920
- Prop: T9545
- ESC : AIR 20A
- FC : CUAV V5+
- Firmware : Arducopter 4.4.1
- BAT’ : 3300mAh, 4cell, 14.8V
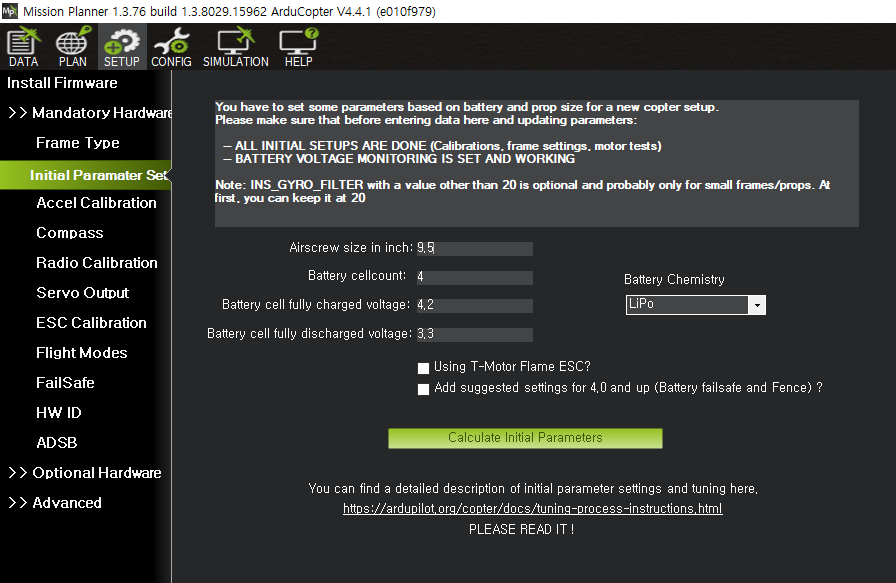
Follow the tuning process instructions and complete the basic tuning
I proceeded with AutoTune on a windless day, but I failed repeatedly.
During the very late calibration of Rate Down and Rate Down % I tried to land because I was always out of battery and received these messages from time to time Autotune failing to level please tune manually.
In my short opinion, it seems that the lack of battery capacity and cold weather caused it, but please advise me on the tuning process procedure I conducted and the cause of the failure.
I attach the list and log file below that I have done.
Thank you.
MOT_BAT_VOLT_MAX : 4.2v x 4 = 16.8v
MOT_BAT_VOLT_MIN : 3.3v x 4 = 13.2v
MOT_THST_EXPO : 0.64
MOT_PWM_MAX : 2000
MOT_PWM_MIN : 1000
MOT_SPIN_ARM : 0.08
MOT_SPIN_MAX : 0.95
MOT_SPIN_MIN : 0.11
INS_GYRO_FILTER : 44
ATC_RAT_PIT_FLTD : 22
ATC_RAT_PIT_FLTT : 22
ATC_RAT_RLL_FLTD : 22
ATC_RAT_RLL_FLTT : 22
ATC_RAT_YAW_FLTE : 2
ATC_RAT_YAW_FLTT : 22
ATC_THR_MIX_MAN : 0.1
MOT_THST_HOVER: 0.25 (initial setting) → 0.2510274 (after althold flight)
MOT_HOVER_LEARN : 2
PSC_ACCZ_I : 0.5127268
PSC_ACCZ_P : 0.2510274
INS_LOG_BAT_MASK : 1
Since then, there was no unusual vibration, so we immediately moved on to AutoTune.