I need help to identifiy the problem with my copter. Could someone please help me to analyse my log file? Log file
The full story:
In February my copter crashed during a mission after the RTL comand and landed with 19 m/s in the field. It first yawed away and lost altitude. When I tried to rescue it in loiter and stabilize I first managed to bring it back ~100 m into my direction but then it yawed away again and lost height. I could not rescue it with loiter, brake, RTL or stabilize full thorttle, it just smeared off.
I originally thought this was due to interferences on the site because I had problems on several days at this site but not on others. Also I had problems to process my RTK GPS logs because of a teribble signal to noise ratioon the ground and in the air. I had to fly there to get the data and it was very far from people, so the risk was justified in case you think I’m stupid (I am because I did it for free for a student but that is another story).
I have now rebuild the copter and replaced the motors and after testing the flight controller and the motors etc. on the ground I did several successful hoverflights this morning. Then I went to the field for a mapping flight and there I faced again several problems (the copter did yaw away, it did not respond to throttle input, it did not hold altitude in loiter mode) and I could not fly. After some trials I finally crashed again… . I also saw that the motors randomly do not spinn up during motor test.
I have several ideas what could be the problem (+ = likely, o = maybe, - = not so likely)
something is wrong with my transmitter or my receiver
1.1. my transmitter is damaged and does not transmit the singnals (-)
1.2 my receiver is damagend and sends wrong information (o)
1.3 I some how messed up the channels and calibration of the tx/rx (o)
the flight controller is damaged (o)
the flight controller is wrongly configured (+)
3.1 problems with the pwm output (+)
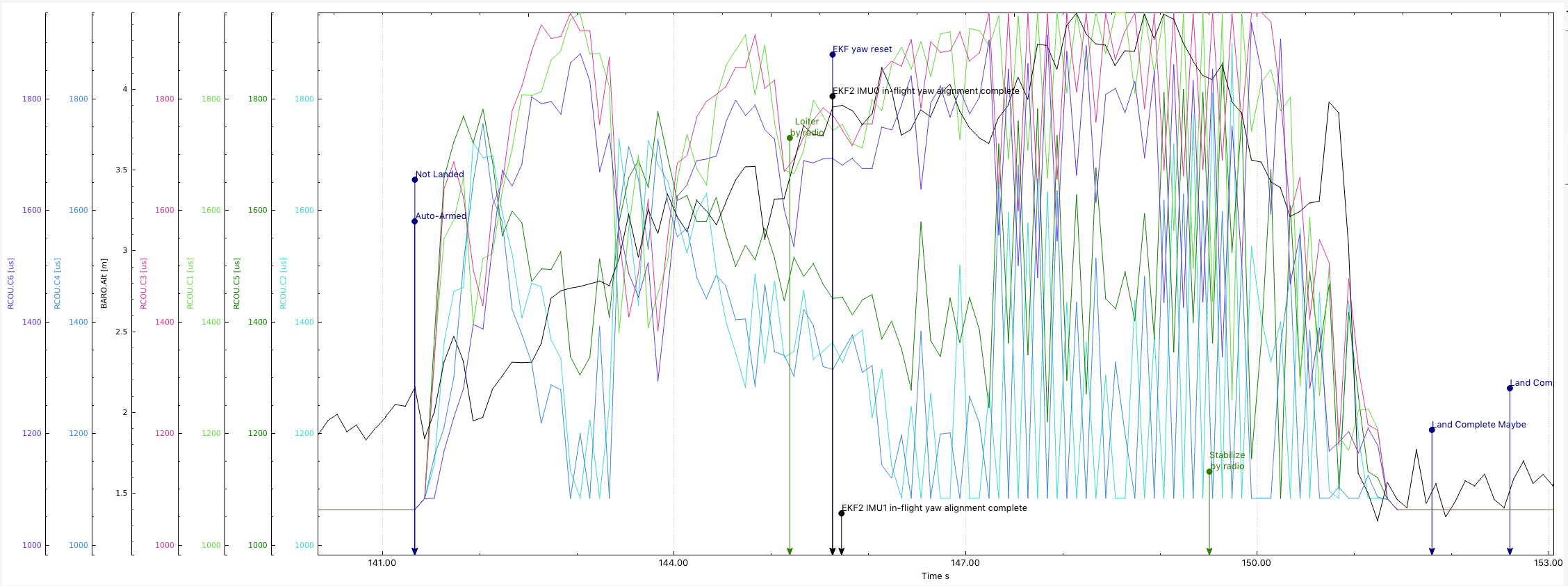
Check the motor are spinning in the correct directions with the correct props and the esc’s are calibrated correctly. Motors 1,3 and 6 are being driven hard
I have tested all motors and props. They should be ok. I did a esc calibration this evening, but they had already been calibrated. I think I will also have a look at the timing.
Interestingly motor 3 was looking relative slow most of the time. So I guess it did not do what the fc did command?
As @ardisd points out you have a serious issue with the CW motors and props.
They are being driven to max with so little effect that 2, 4 and 5 are being basically shut down.
You haven’t given details about the size of the copter but I am assuming you have props over 13"
If this is the case then you need to adjust ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT down from 20 to 10.
Not all props are well made and I would check the CW props deliver the same thrust as the CCW props.
Are the motors level?
Is there flex in the motor mounts?
Props on tight?
RCin seems to be OK.
Your ATC_ANG values are a long way from default and you have a roll oscillation set in under power.
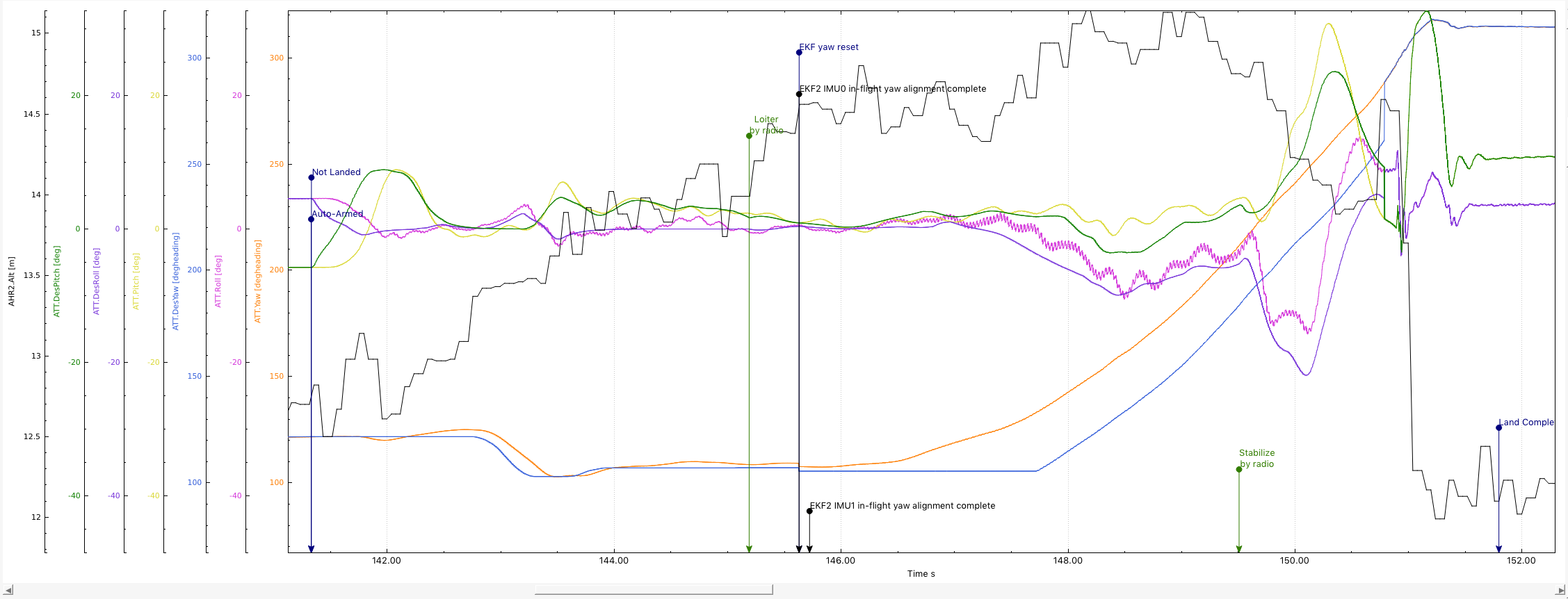
I would check if you have by any chance 1 motor spinning in the wrong direction. Looking at the rate log it looks like Yaw rate works hard to keep the aicraft in the yaw axis and i think the separation of the motors comes from there.
Thank you very much everybody, I think I can narrow down the problem with your helpful tips. I will report the results later. I will check the motors and thrust again.
The copter was autotuned, but the yaw axis did not tune very well. But anyhow I did not have problems for over a year and at least 25 h in the air.
I sit here and think I’m getting cracy. All the motors are turning in the wrong direction now. ALL THE MOTORS!!!
My props are with fixed screws. It is not possible that they changed since the last flight. But now the props are turning all!!! in the wrong direction.
I use a Airgear 350 set. WTF.
EDIT: Ok, there seems to be a problem with the ESC calibration. After calibrating the motors are turning in the right direction again.
EDIT2: now, after another calibration trial one motor is turning in the wrong direction.
Some brands of ESC have the feature of being able to change motor direction in software. If the ESC was messed up it could do that. If it is a 3D ESC which you should not be using, they by design can change motor direction.
Thank you for the hints! Its a T-Motor AIR 20A ESC. http://store-en.tmotor.com/goods.php?id=367 I might have messed up the settings because it comes with an old manual. The one on the website differs from the one I have. But I cannot see a possibility to change the direction. Maybe a cable is
Edit: or is switch over the direction change? The I wonder why one did not change.
BLheli and SimonK based ESC can change motor direction in software. IF there was a ground problem the processor on the ESC might not read the values correctly and misinterpret the direction parameter or it could just plain defective. There is not a switch controlled direction feature.
After resetting and recalibrating the escs the motors are turning in the right direction again. I also did replace 1 esc which did show other behavior than the rest. I also managed to hover for 10 min.
I have to come back to this problem again since I did not solve it yet.
My CCW motors are running at 100% throttle while the CW motors are still at 10 or 40 %. This caused several crashs after a year of successful flights without any crash at all.
I need to understand why that happens, so I have some questions to the people with more insight into the motor control.
I think there could be several problems (props, motor directions and motors are checked and there is no problem there):
bad YAW tuning/pid values (is that possible)?
a bad esc on the CCW motors (defect or bad calibrated)
bad wiring between the ESC the motors
bad wiring between the ESC and the PWM output
bad PWM output
Any ideas how to narrow down the problem?
Reviewing my logs from the last 12 months I can see that the problem is more or less always present. Not as big as now, but always visble and amplified by a heading where the wind must be compensated by the CCW motors.
Maybe its also a problem of an badly constructed hexacopter?
May be a lot of weight aft of expected CG (around grey bar on top of your card). Check it and move weight if needed. CG should be at middle distance between front and aft propellers groups.
What I wonder is why that results in an onesided YAW authority loss. Even before when the center of gravity equaled the center of thrust because I had a ligther camera and no GPS in front I had this CCW/CW motor imbalance.
Just hover for 1 or 2 minutes without touching the roll & Pitch stick.
If CW/CCW lines are grouped when you graph RC1 out to RC ‘n’ ,
it is a clear indication of motors not straight or twisted ARMS.
The top motors (in graph) are working hard to compensate an induced yaw by the other (not so straight) motors.
If round arms:adjust the motor mounts.
if square arms , or
moulded arms ,::place shim under the motor screws…!
Again graph., adjust, graph ,adjust,…until ur satisfied.
PS:in a hover…
Ok, thank you both for the advice! I will look into that this evening. I think the motor nr. 4 is a little bit twisted, I did not expect that to be amajor problem. I will replace the arms with aluminum square tubes for a test.
I have renewed the calculations for the cog and the cot and I will make the front arms a little bit longer to correct the problem.
The copter hovers at 20A (total power draw) if there is no wind. The maxium current is ~45A. The maximum current I have ever seen during normal flight under windy conditions was 34A.
 (I am because I did it for free for a student but that is another story).
(I am because I did it for free for a student but that is another story).