You may want to try setting ARMING_REQUIRED to 0. BRD_PWM_COUNT is 2 and you are using outputs 1 and three so I don’t know if that is a problem. Cruise throttle , although not a problem for manual, is only 5.
Thanks I’ll change them asap.
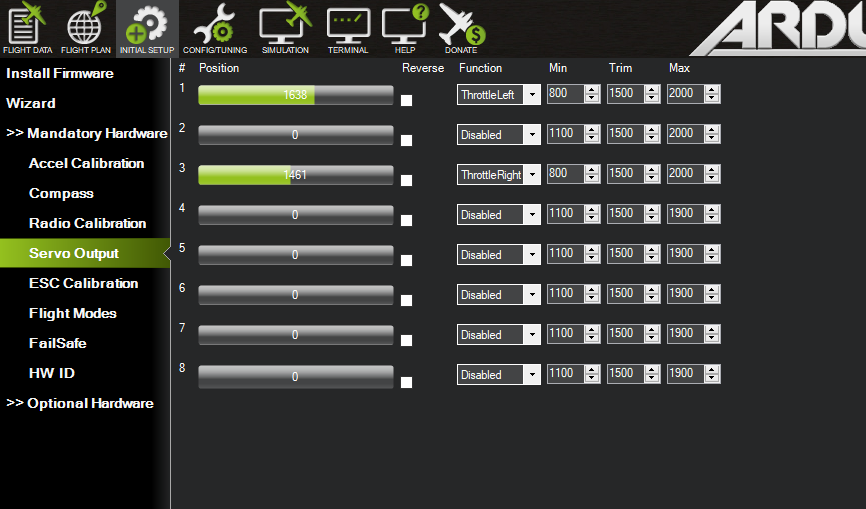
I use 1 and 3 because of skid steering.
yes. it works well in manual mode now. thanks. I’ll do the bath tube test now.
how ever i can’t disarm it 
Well I think this proves you were not arming the system before. That was kind of the purpose.
Well it was arming. but now it is auto arming and i can’t disarm at all now.

Prop test failed. when on reverse, props spin off.
Problem 2: The shafts carry water in the boat.
I think i should buy a brandnew set of sharft/prop that can do reverse and forward.
The shaft carry lotta water in the boat. that’s a big problem…
Okay. when armed, after some point the servo out puts seen as 0. as if ESC stopped working.
there may be a power surge. I need a crocodile to ensure the wire isn’t moving(usid lead acid batt.)
One more thing. Only one prop spinned off. its midnight here. too much noise lol.
tomorrow morning i will test the props again.
I think ESC’s are fine.
Lidar is working really good!!
And i need to charge the battery as i have used it much and its only 5ah.
Now i have secured the prop really tight…
Ill try reversing tommorrow.
ps: i turn on the ESC’s after turning on the pixhawk. this may the issue with inconsistency.
I really need to solve the water intake issue.
after everything is stable in Manual I’ll test it on my big open pool. and report it here. I have a pair of extra props in case anything goes wrong.
then ı’ll test the automode on sunday hopefully.
btw: when i change the parameter of ARMING_REQUIRE to 0. it auto arms and i can’t disarm at all.
and i really need to learn how to assign a switch in the RC for ARM/DISARM rather than the thr stick right and left(very inconvenient)
thank you for all the help. I have some hope finally that the boat will make it in automode with collusion avoidance .
Set ARMING_REQUIRE to (1), ARMING_RUDDER to (0) then configure a switch of your choice on the Radio. Let’s say it’s switching channel 7. Then set RC7_OPTION to (41).
I don’t follow much of anything else you posted other than the boat takes on water. A lead acid battery? Really, why? Maybe it’s too heavy for the boat and that’s why it’s taking on water.
You need to find a set of left hand nuts to jam against the other ones. That would probably solve the prop problem
Boat takes it really well. Boat is 5kg total and 92cm long.
Unfortunately Lipo is over expensive here in turkey(a clone pixhawk is x4 times than its in amazon.com) . I had to go with the SLA Battery. as they are very easy to charge and cheap.
lipo’s are x3-4 more expensive than in hobbyking. also, I’m a beginner and lipo made me nervous. I dont want to burn my house or the boat.
I’ll set these parameters now thanks.
Water leak happens from the shaft entrance. I think I’ll get some foam.
boat’s buoyancy and gravitational center looks really nice. Only problem is the shaft i guess.
Btw. after testing the props this morning(i had a lot of water in take) props look solid in reverse modes.
thanks. I’ll see what i can manage. After tightening the props thoroughly they didn’t spin off. I probably didn’t fit them well in the first place.
 they used to be the same
they used to be the sameit worked!
I assigned Gear button to ch7. and did the parameter as you described. It arms/disarms with the switch! Thanks a bunch!
Make sure the trims on your radio are centered at all times and don’t use them for anything. Then run Radio Calibration in Mission Planner. After that if you do not want your props to reverse make the setting on the Servo Output page I posted earlier and try it out. I would not trust that the self tightening props will stay on in reverse. It’s more likely they will spin off under load and then your boat will be dead in the water.
For what you are doing why did you go with a dual motor setup in the 1st place? It would seem that a typical prop and rudder setup would be easier to manage.
I really didn’t have much option.
It is a very low budget project. Right now i have 2 big issues.
Water leaking(shaft entering) i think i need white glue?
2nd is the left shaft. It’s not working well. There’s a friction. https://youtu.be/IYf2VAOTcUg
I really don’t want to change the shaft as there is limited option and i can’t do it
In this video they added this rudder…
I have a fixed plywood that houses esc battery and pixhawk. Maybe i should add a bec and servo for rudder? https://youtu.be/9OOAtUnSkxg like this
Luckly there are bunch of poles for stuff to mount in. Really. I used 12 screws to fix the plywood. It was some luck for me.
I chose this one because it is sold 100 usd here in Turkey.
Actually, this boat is quite good for adding stuff in it and cheap.
The top part of cockpit is removeable. Even mounting the camera was easy!
This rudder is sold here. Maybe i should completely leave alone the skid steer and add rudder.
Can the rc transmitter power it? No right. How will i power it😑
That boat is cheap because the components are very low quality. I can’t tell from those videos what actually seals the props shafts at the transom. All I see is very sloppy globs of silicone. They sell a boat similar to that here at a Tool Outlet store for ~$60.
I wouldn’t bother with adding any value like a rudder to that boat. That’s throwing good money after bad. But if you did you can power it from the BEC in the motor ESC’s. Get it running as it’s intended to run with differential thrust and hopefully it will run long enough to get thru your thesis!
Yes you are right. Adding a rudder is a cost.
Esc’s 5V red line is available other 2 connected to the pix hawk?
Well if the 5V+'s are enough i can use them on the gimbal servos.
Yes the boat is cheap. That’s the whole idea.
I’m looking for new props now. I saw flex ones? Are they okay? Would it really work?
I hope differential works. I will buy marine glue. Its very cheap. And i will pour it around the shaft tube entrance to the boat. Hopefully will fix the issue.
I want to test it on the auto mode then. The disarm switch changed lots pf things for me already!
I spent near a thousand bucks. And boat is the ten percent lol.
How do you have the BEC from the ESC’s connected to the Pixhawk? Normally there would be no connection if you are using a power module. No power module?
$1000? Wow, things must be expensive in Turkey, that would buy a lot of kit here.
My wrong. The esc’s pwm is connected to the pix hawk. PM’s power line (bec) is connected to the pix hawk.
But i don’t have an additional bec or power line
You don’t need an additional BEC. One will power many servo’s.
Okay. But i didn’t get the thing with servos.
To power 2 servos, how will i do the wiring?
Power module has 1 xt60 out for escs and 1 out for pix hawk?