Hi All,
I am exploring the wonderful webtools available for the Ardupilot, it is really helpful. Just need some understanding.
First is the magfit.
It shows the different calibration values for each flight with the same drone.
This is the flight log: https://drive.google.com/file/d/1NhJ4bgNbZMBnljXbEEQvfuXkcjHVDW_X/view?usp=sharing
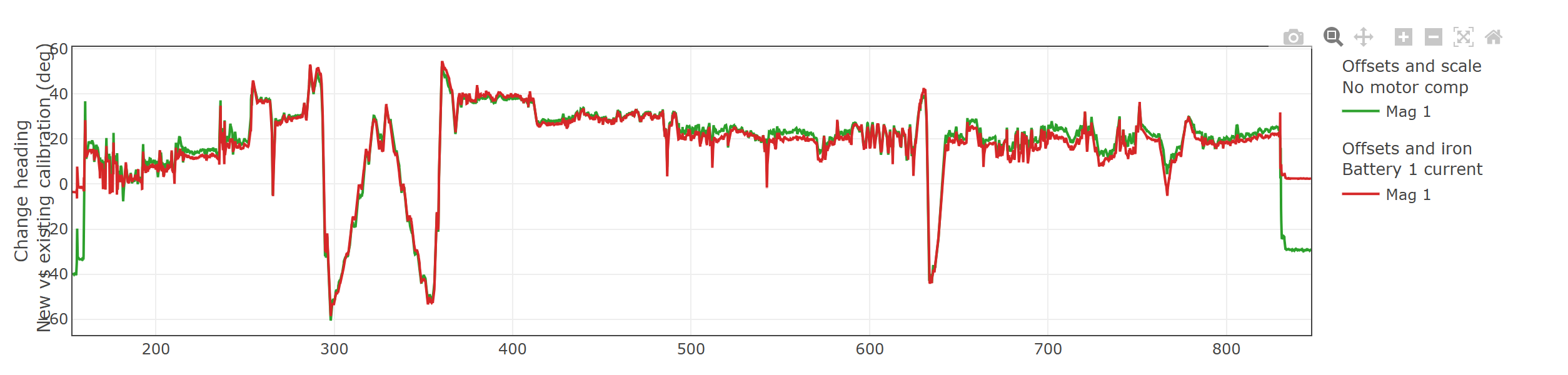
My understanding of the tool is:
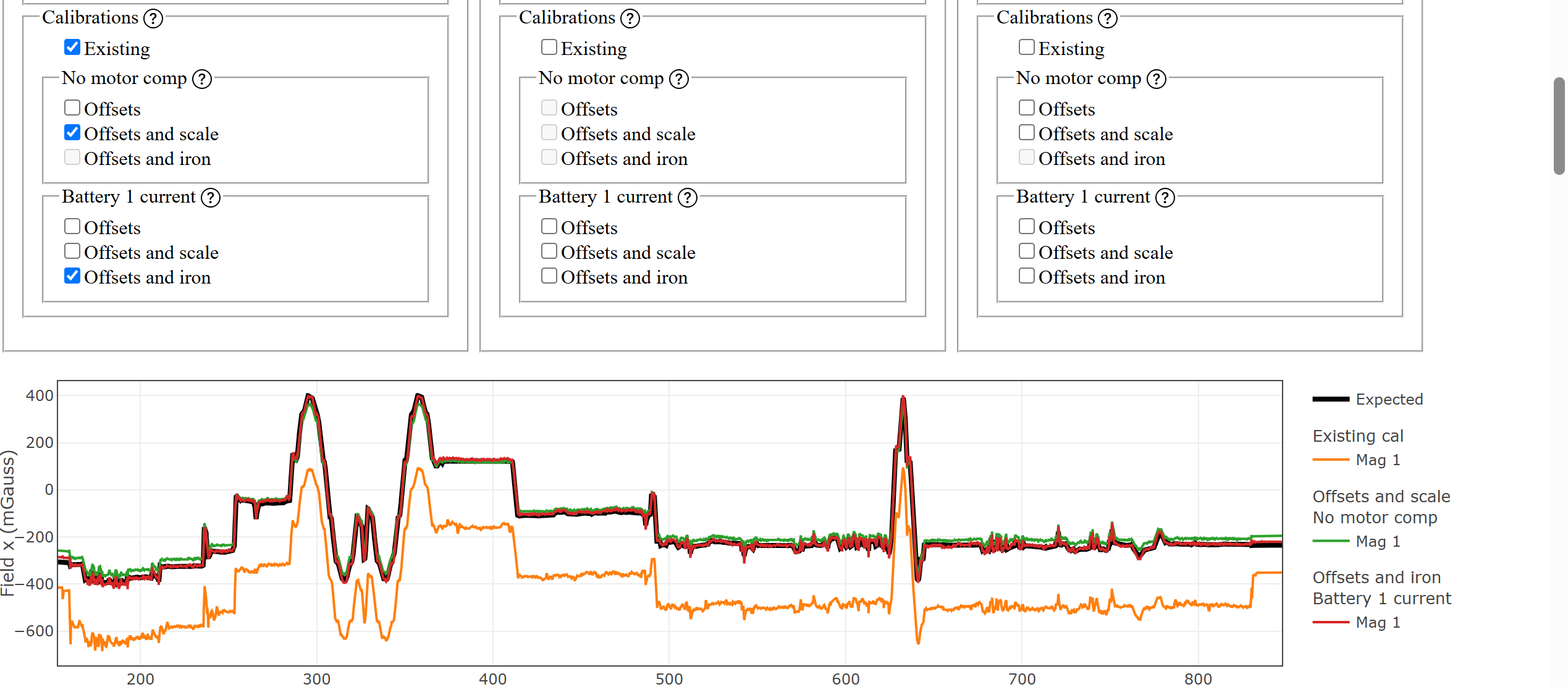
For the Mag X field, without motor compensation also works well.
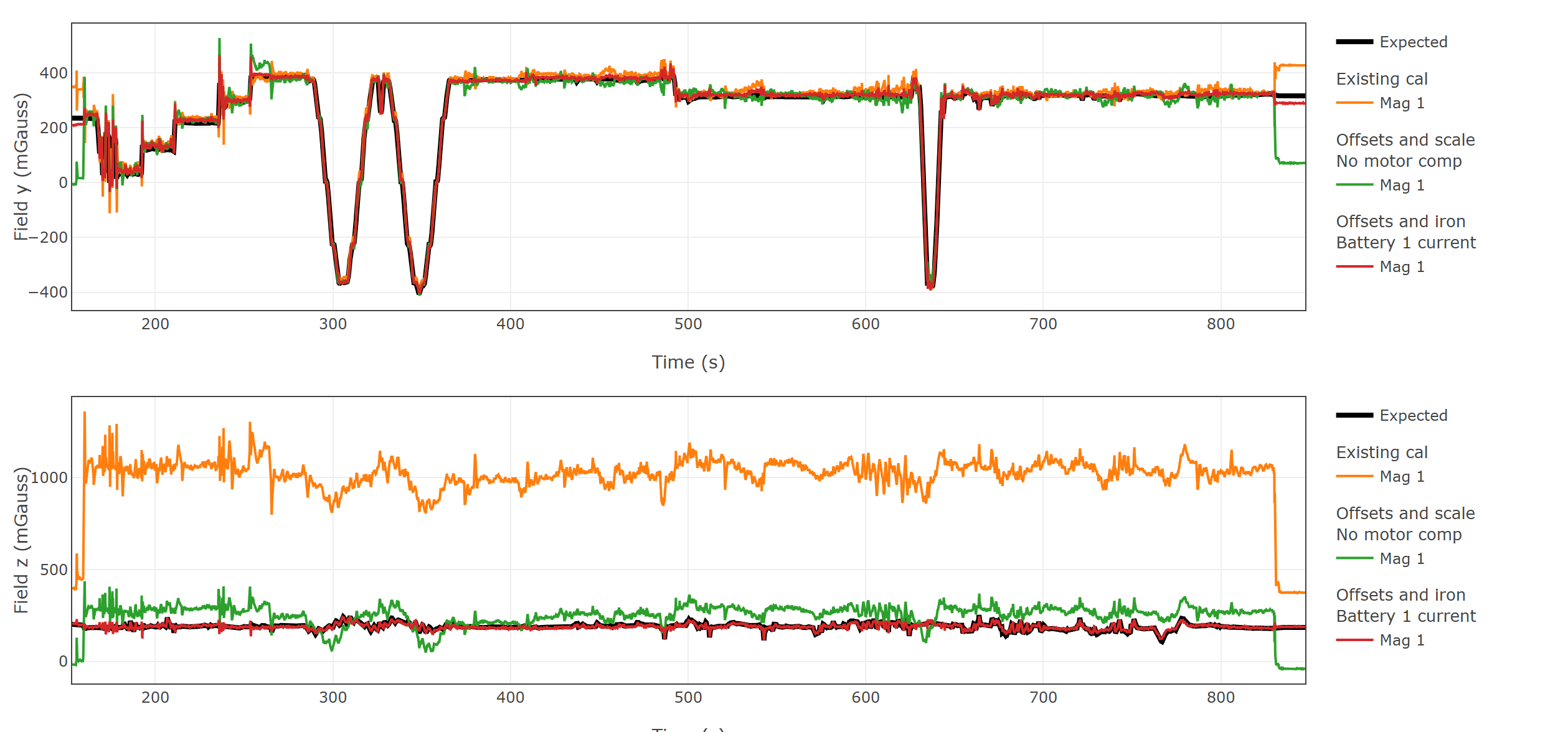
Y field also matches fine, Motor compensation will be good and need while Z-field calibration.
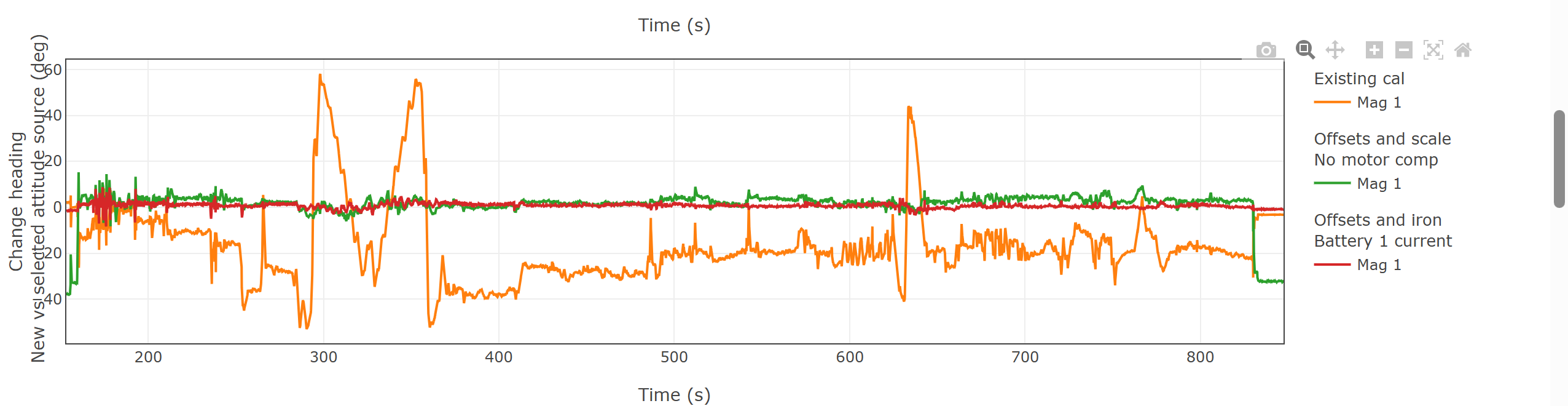
There is deviation of up to 40 degree in the compass heading with the actual heading and If I save the Offset and Iron with battery current then that would be the best possible compass calibration for me.
If anybody can check the above logs and tell me if I am right or not? because my understanding says that there is a huge magnetic field deviation and I might have some interference problem. If somebody can please tell me that the calibration with magfit will good enough for me or not? so that I will try to change the compass location to some other place (currently that is the maximum I can keep).
I just want to know whether it will safe to fly with the magfit calibration or not.
I noticed one more thing, the different flight shows me different calibration output.
I need to only check the heading errors right? it should be as low as possible once I calibrate the compass and fly?
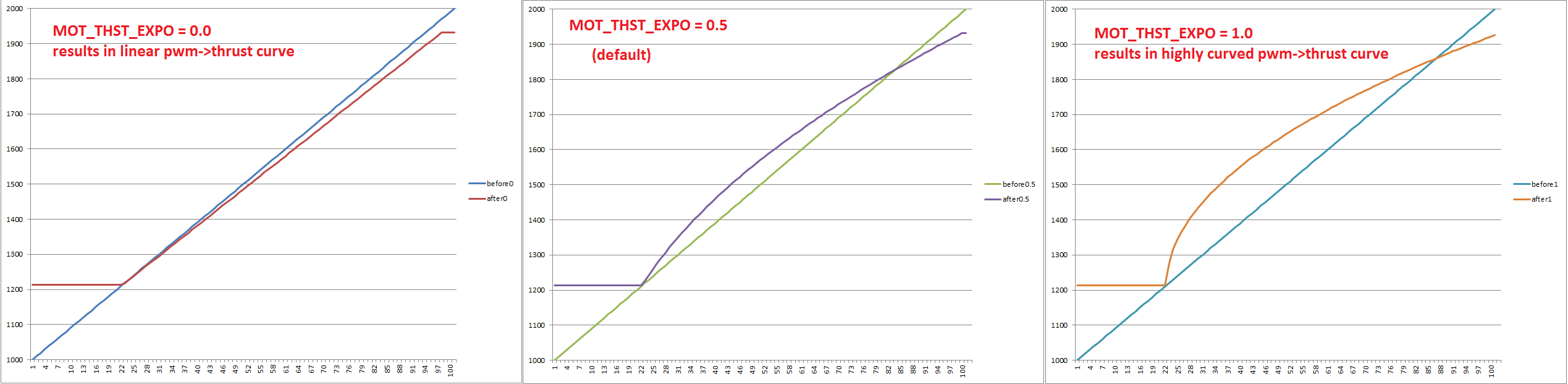
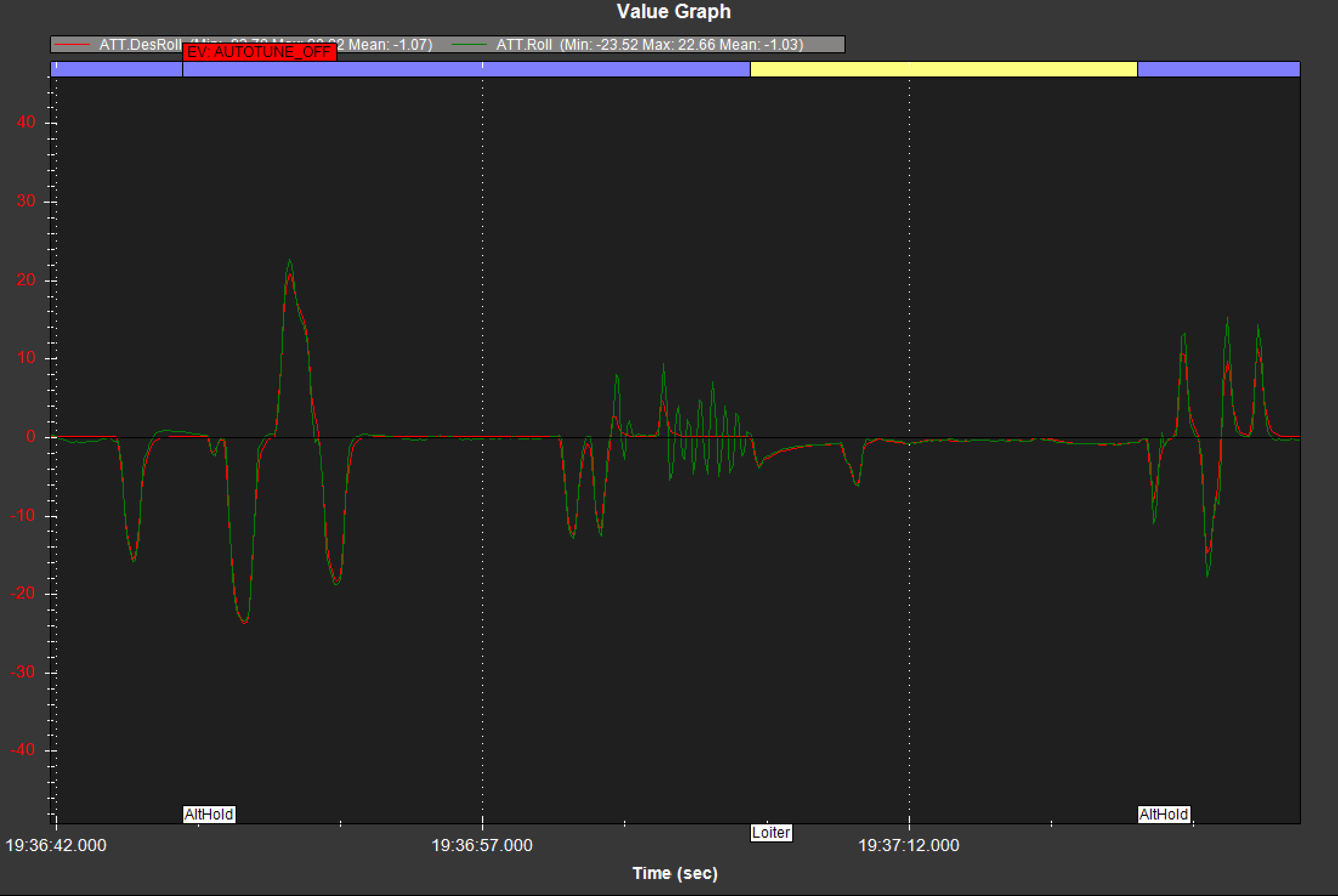
Second I am exploring the PID webtool also, I just want to know, whether is there any possibility to estimate the PID values for the drone using the log analysis with that tools? I know it is a whole different subject. But I just want to learn whether there is any possibility to estimate the PID values by analysis the logs or not.
If anyone can explain me with the above logs example, then it would really be helpful for me.
Thanks! hope I get really amazing and good response.